






- Resumen
- Productos recomendados
- Las PCBA y los componentes electrónicos son muy sensibles a las descargas electrostáticas (ESD). Se requiere que los operarios usen pulseras antiestáticas o guantes antes de manipular las placas o realizar el montaje, para garantizar una correcta disipación de la electricidad estática.
- Durante el proceso de instalación y fijación, evite la deformación de la placa base causada por los elementos de fijación.
- Asegúrese de alinear correctamente la interfaz MIPI durante la instalación de la cámara. Verifique la dirección del pin 1.
- Ensamblaje del conector B2B: Siga la secuencia «acoplar primero, atornillar después». Alinee y presione los conectores para acoplarlos completamente antes de apretar los cuatro tornillos de las esquinas. Esto garantiza que el conector soporte las tensiones provocadas por las vibraciones, mientras que los tornillos soportan principalmente el peso.;
- Al instalar periféricos (USB, E/S, etc.), preste atención a los niveles de entrada/salida (E/S) de los periféricos y a los problemas de corriente de salida;
- Al instalar el puerto serie, verifique si los dispositivos RS232 y TTL están conectados directamente, si los métodos de conexión de TX y RX son correctos y si los niveles de señal son adecuados;
- Verifique si la alimentación de entrada está conectada a la interfaz de entrada de energía y si el voltaje y la corriente de la alimentación de entrada, entre otros parámetros, cumplen con los requisitos según el conjunto total de periféricos.
Descripción
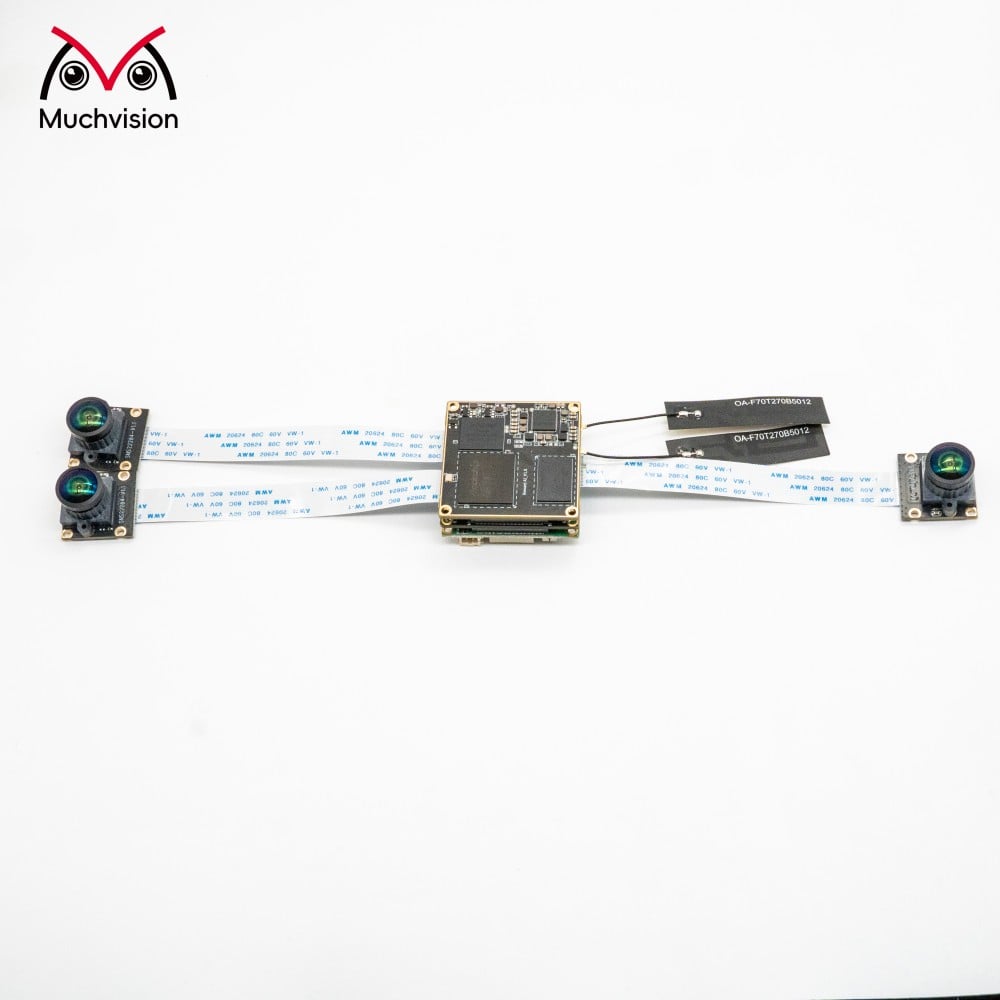
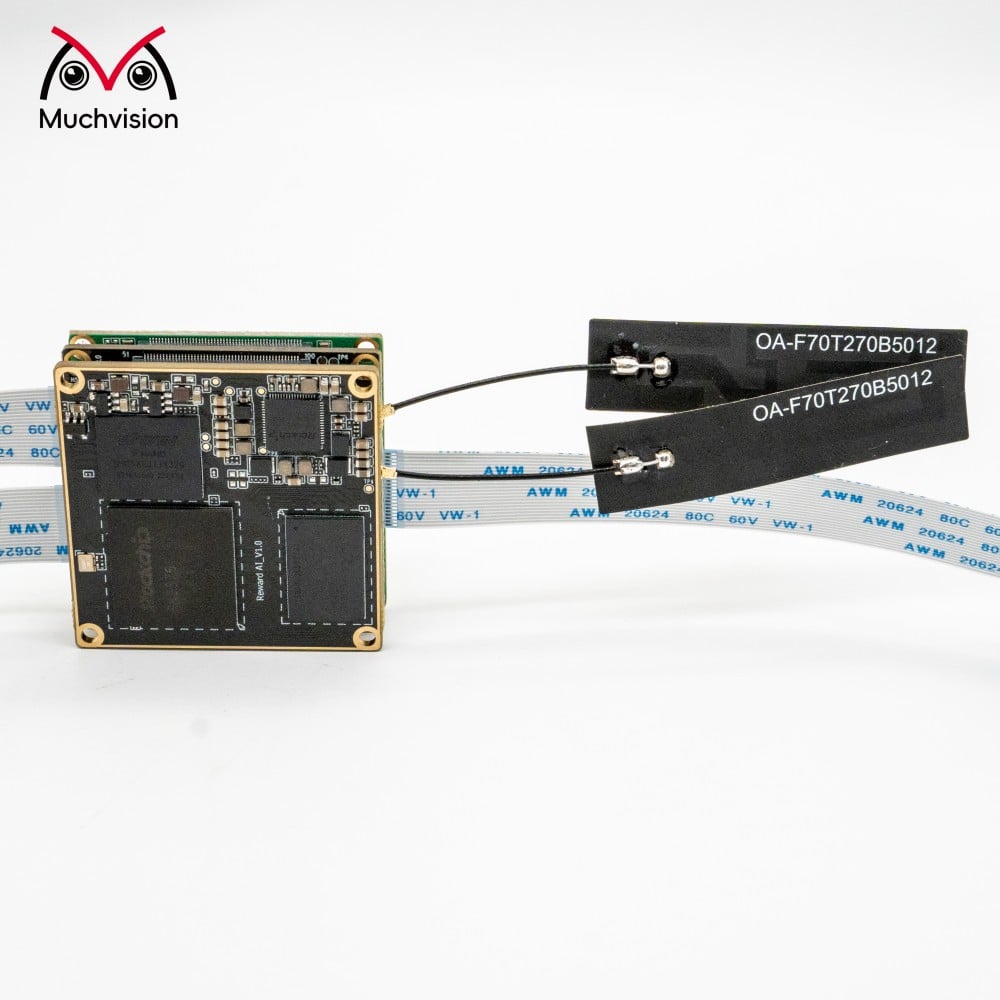
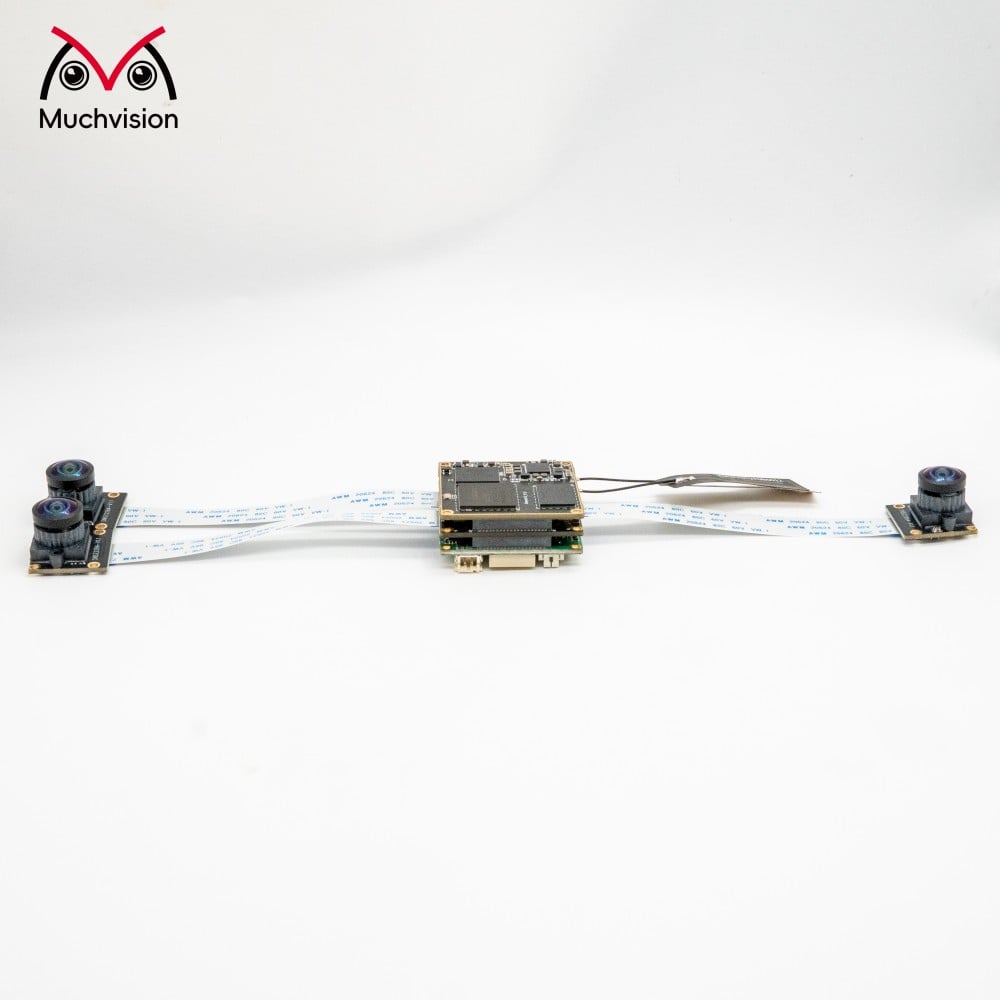
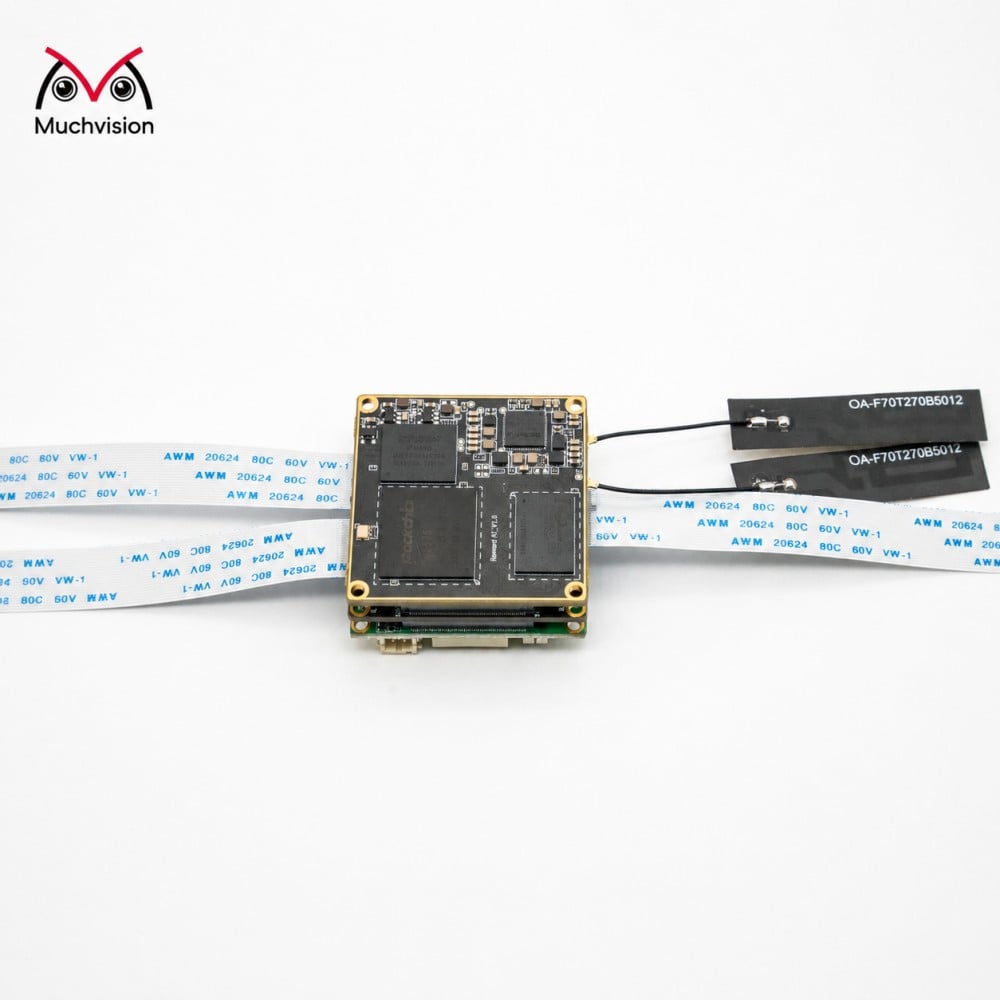
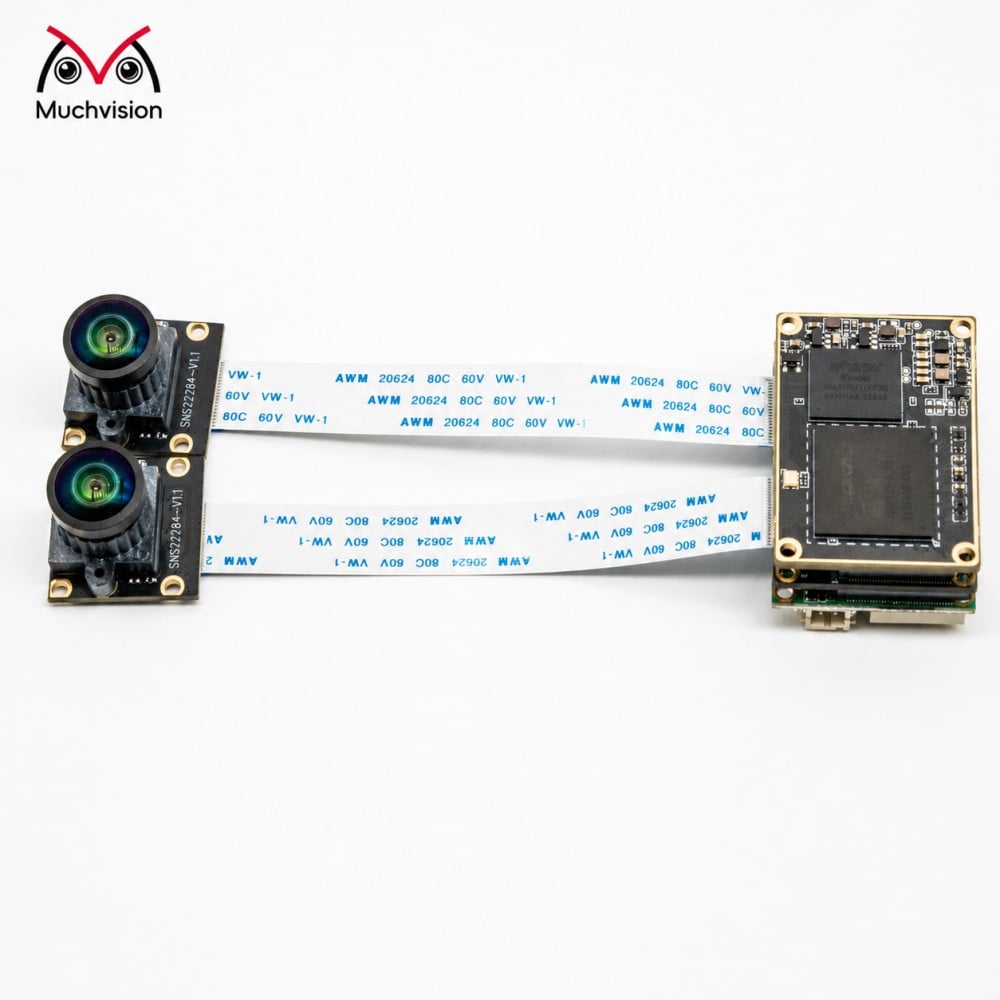
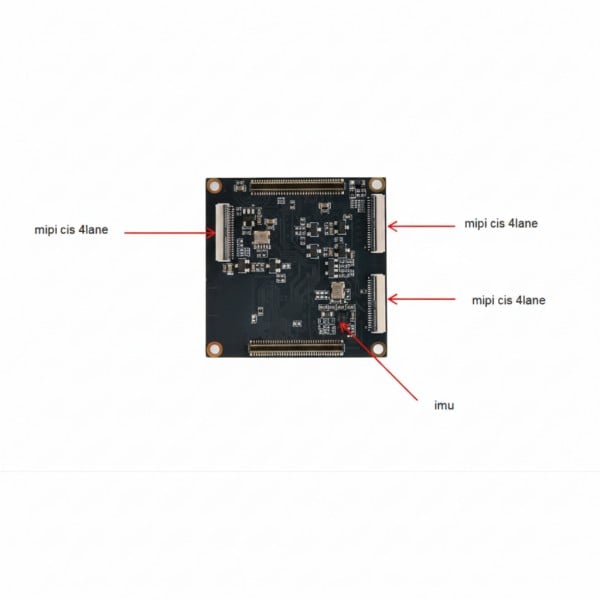
MV12-V1.0 Este producto es una plataforma de computación visual y multimodal sincronizada de cuatro canales, basada en el potente procesador Rockchip RK3576. Integra una unidad de medición inercial (IMU) de alta precisión con cuatro interfaces independientes de cámara MIPI. Mediante un mecanismo de disparo de sincronización a nivel de hardware, garantiza una alineación espacial y temporal a nivel de microsegundos entre las imágenes visuales multicanal y los datos de actitud y movimiento.
Aprovechando la potente arquitectura heterogénea de ocho núcleos y la capacidad de computación de IA del RK3576, el sistema no solo admite el procesamiento paralelo de múltiples flujos de vídeo en alta definición, sino que también ejecuta en tiempo real, en el borde, algoritmos complejos de mapeo SLAM, localización VIO e inferencia de IA. Esto proporciona una base sólida de datos para una percepción precisa en entornos dinámicos.
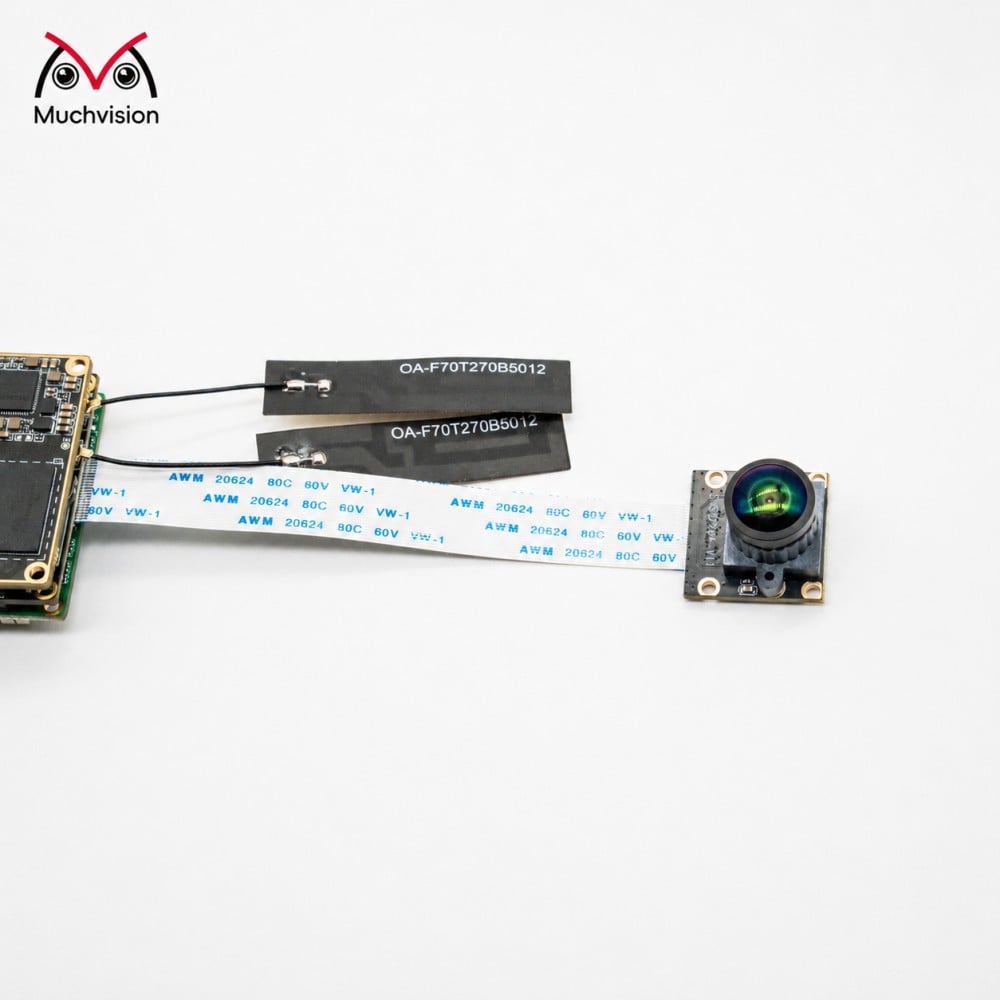
La plataforma ofrece una compatibilidad y adaptabilidad excepcionales con sensores, y se adapta a diversos escenarios, lo que permite la selección flexible de sensores de alto rendimiento líderes en el mercado para construir soluciones personalizadas de percepción. Es compatible con una variedad de sensores de poca luz y de obturación global, incluidos los IMX662, IMX464, OV9281 y AR0234. Combinada con la compensación de actitud de seis ejes proporcionada por la unidad IMU integrada, el sistema mantiene capacidades de autolocalización y percepción ambiental de alta precisión incluso en condiciones extremas, como entornos sin señal GPS o cambios drásticos de iluminación. Además, la placa principal dispone de numerosas interfaces de expansión SPI e I2C, con soporte nativo para matrices de micrófonos, altavoces y módulos de gestión de carga de batería. Este diseño altamente integrado otorga al dispositivo la capacidad de "oír" y "hablar", elevándolo desde un simple terminal de percepción visual a un sistema inteligente capaz de interactuar mediante voz, ofrecer retroalimentación de estado y operar de forma móvil, simplificando notablemente la complejidad del diseño de los circuitos periféricos.
Con las ventajas integrales de «alta potencia de cálculo + fusión multi-sensor + sincronización por hardware + rica interacción», este producto impulsa ampliamente campos de vanguardia como la IA corporizada, la inspección industrial y la conducción autónoma. En aplicaciones de robots humanoides, actúa como una unidad central de percepción, permitiendo la evasión de obstáculos a nivel de milisegundos y la sujeción precisa cuando se combina con cámaras de obturador global, mientras logra una interacción hombre-máquina natural mediante su módulo de voz. Para la inspección industrial todo el tiempo, utiliza sensores de grado estelar que garantizan la seguridad visual durante operaciones nocturnas, además de emitir alertas de anomalías mediante su altavoz. En el ámbito de la conducción autónoma a baja velocidad y los vehículos logísticos, logra una vista panorámica de 360° y una navegación de alta precisión mediante la fusión visual multi-cámara. Ya sea para investigación y desarrollo o para despliegue comercial, esta plataforma constituye una opción ideal para resolver desafíos complejos de visión por computadora y ampliar los límites de la interacción.
Escenarios de Aplicación
Productos terminales con capacidad visual para sectores como finanzas, medios de comunicación, pagos, comercio minorista, control industrial, educación, gobierno/empresas y atención sanitaria. Es adecuado para aplicaciones como robots humanoides, comercio minorista inteligente, cámaras panorámicas, almacenes no tripulados, clasificación y entrega inteligentes, y equipos automatizados de UAV.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Parámetros Estándar
| Parámetros clave | |
| CPU | Procesador octacore de 64 bits (4×A72 + 4×A53), con una velocidad de reloj máxima de 2,2 GHz |
| GPU | G52 MC3 @ 1 GHz; compatible con OpenGL ES 1.1/2.0/3.2, OpenCL 2.0 y Vulkan 1.1 |
| NPU | unidad de procesamiento neuronal (NPU) con potencia de cálculo de 6 TOPS, que admite operaciones INT4/INT8/INT16/FP16/BF16/TF32; capaz de funcionar en colaboración dual o de forma independiente; admite multitarea y procesamiento paralelo en diversos escenarios |
| Isp | Incorpora un procesador de imagen integrado (ISP) de 16 megapíxeles que soporta reducción de ruido en condiciones de poca luz, un sensor RGB-IR y HDR de hasta 120 dB. El ISP con IA mejora la calidad de imagen reduciendo el ruido. |
| memoria | LPDDR4/LPDDR4x/LPDDR5 (opcional: 4 GB/8 GB/16 GB) |
| Almacenamiento incorporado | eMMC (opcional: 16 GB/32 GB/64 GB/128 GB/256 GB) |
| Codificación de video | Decodificación de vídeo: 8K@30 fps / 4K@120 fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60 fps (H.264/AVC) Decodificación de vídeo: 4K@60 fps (H.265/HEVC, H.264/AVC) Decodificación de imágenes: MJPG a 4K@60 fps |
| potencia | DC 5V |
| Sistema operativo | Compatible con el kernel RTLinux, que ofrece un excelente rendimiento en tiempo real y se utiliza ampliamente en aplicaciones industriales. Compatible con el sistema operativo Linux y Buildroot para proporcionar un entorno de sistema seguro y estable para el desarrollo y la producción de productos. Incorpora nuevas capacidades industriales, como redes en tiempo real, Flexbus, aislamiento de recursos de hardware y DSMC, satisfaciendo así diversas necesidades de aplicaciones industriales. |
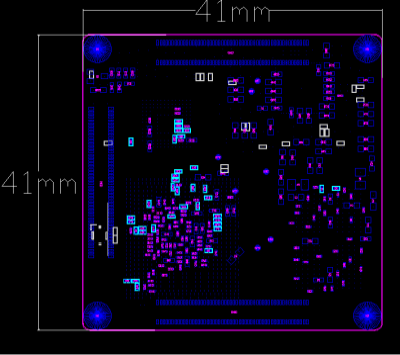
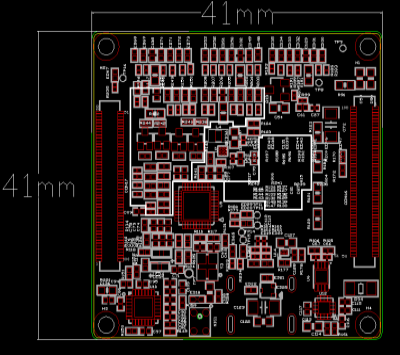
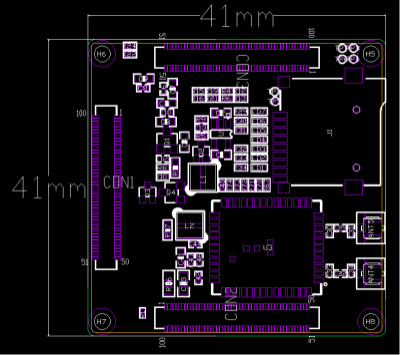
| tamaño | 41 mm × 41 mm × 20 mm |
| Compatible con cámara | interfaz MIPI de 3 canales y 2 líneas: OV9281, IMX662, AR0234, IM464, etc., compatible con personalización |
| Giroscopio IMU | 4 giroscopios de la serie TDK ICM42670 |
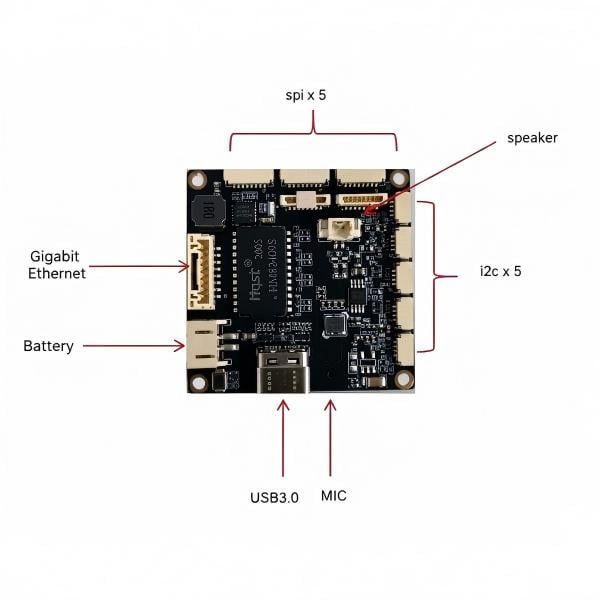
| Ethernet | 1 puerto Ethernet Gigabit (conectado mediante un conector tipo Wafer de 8 pines y paso de 1,25 mm) |
| WiFi/PDA | Equipado con un módulo WiFi integrado que admite WiFi 6 de doble banda (802.11a/b/g/n/ac/ax) a 2,4 GHz y 5 GHz, además de soporte para Bluetooth. |
| USB | 1 puerto externo USB 3.0 Tipo-C (admite ADB) |
| antena | Ruta 1 |
| botón-pulsador | Botón 1 |
| Interfaz SPI | 5 piezas |
| Interfaz I2C | 5 piezas |
| Micrófono | 1 micrófono digital |
| SPK | Bocina de la Ruta 1 (conector de 2 pines con separación de 1,25 mm entre terminales) |
Tamaño de la placa base
 |
 |
 |
Descripción de la interfaz
 |
 |
Precauciones
Características ambientales
Temperatura
Funcionamiento: 0 ℃ a +40 ℃
Almacenamiento: -20 ℃ a +70 ℃
Humedad de almacenamiento
Funcionamiento: 10 % a 90 % (sin condensación)
Almacenamiento: 5 % a 95 % (sin condensación)
Altitud
Funcionamiento: 10 000 pies (máx.)
Almacenamiento: 20 000 pies (máx.)
Alta temperatura y almacenamiento
Método y condiciones de ensayo, consulte la descripción de la norma GB2423.2 «Ensayos Bd y Bb»
Baja temperatura y almacenamiento
Método y condiciones de ensayo, consulte la descripción de la norma GB2423.1 «Ensayo Ad y Ab»
Ensayo de humedad y temperatura
Método y condiciones de ensayo, consulte la descripción de las normas GB2423.3 «Ensayo Ca» y GB2423.22 «Ensayo Nb»
Precauciones para el montaje y el uso
Durante el montaje y el uso, preste atención y verifique los siguientes puntos problemáticos (sin limitarse a ellos):



