






- Przegląd
- Polecane produkty
- PCBA i komponenty elektroniczne są bardzo wrażliwe na wyładowania elektrostatyczne (ESD). Obsługa płyt lub montaż wymaga noszenia przez operatorów opaski ESD lub rękawiczek zapobiegających ESD, aby zapewnić prawidłową dyssypację ładunku statycznego.
- W trakcie instalacji i mocowania należy unikać odkształcenia płyty głównej spowodowanego przez sposób mocowania;
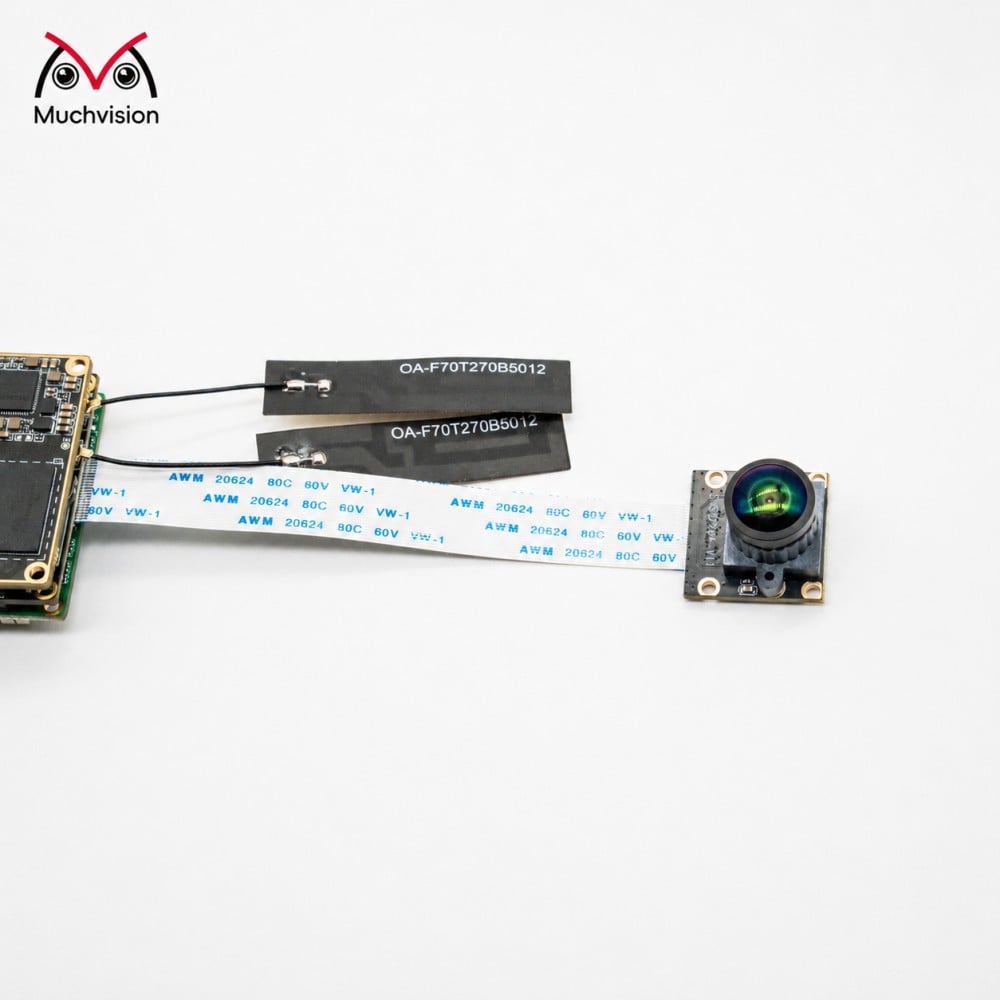
- Podczas instalacji kamery należy zapewnić prawidłowe dopasowanie interfejsu MIPI. Należy zweryfikować kierunek pinu 1;
- Zespół łącznika B2B: Postępuj zgodnie z sekwencją „najpierw połączenie, później dokręcanie”. Wyrównaj i naciśnij łączniki, aby je całkowicie połączyć, zanim dokręcisz cztery śruby w narożnikach. Dzięki temu łącznik skutecznie radzi sobie z naprężeniami wibracyjnymi, podczas gdy śruby odpowiadają głównie za utrzymanie masy.
- Przy instalacji urządzeń peryferyjnych (USB, we/wy, ETC) zwróć uwagę na poziomy we/wy oraz problemy związane z wydajnością prądową urządzeń peryferyjnych.
- Przy instalacji portu szeregowego sprawdź, czy urządzenia RS232 i TTL są bezpośrednio połączone, czy metoda połączenia linii TX i RX jest prawidłowa oraz czy poziomy sygnału są zgodne.
- Sprawdź, czy zasilanie wejściowe jest podłączone do złącza wejściowego zasilania oraz czy napięcie i prąd zasilania wejściowego spełniają wymagania wynikające z całkowitego obciążenia urządzeń peryferyjnych.
Opis
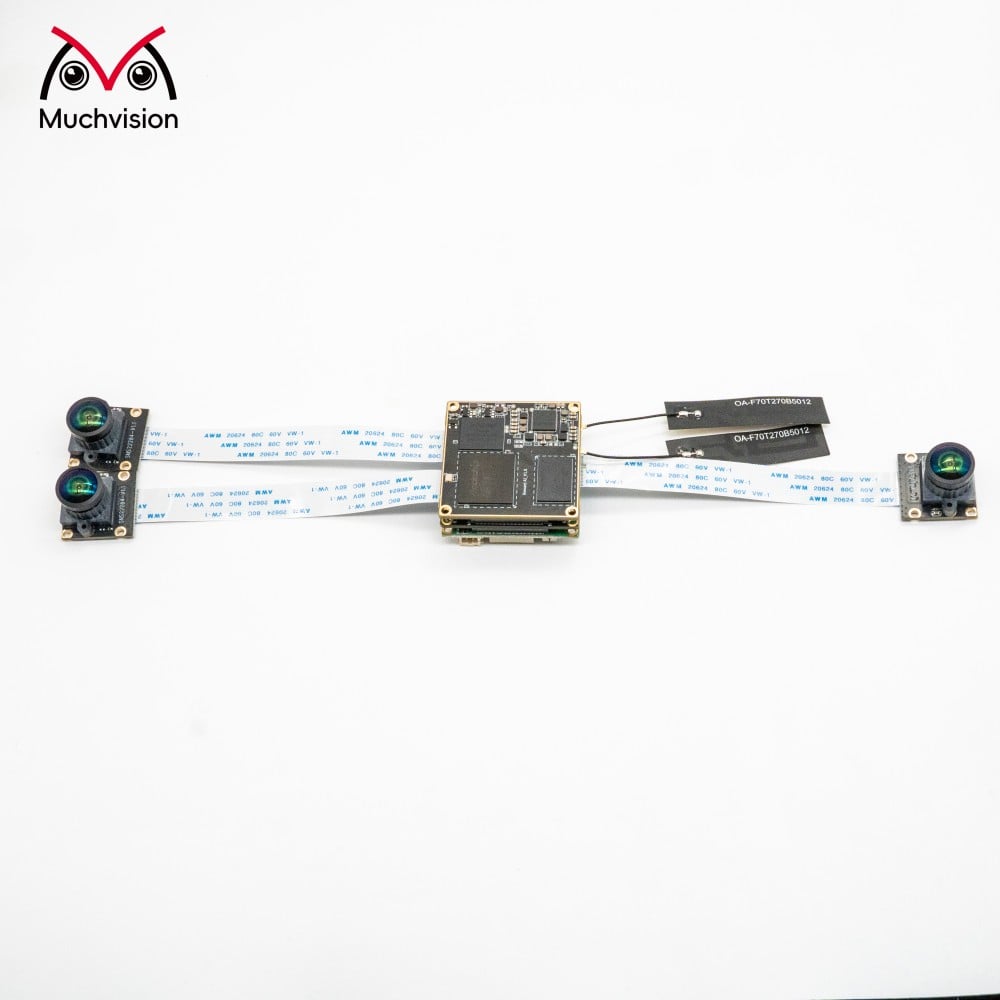
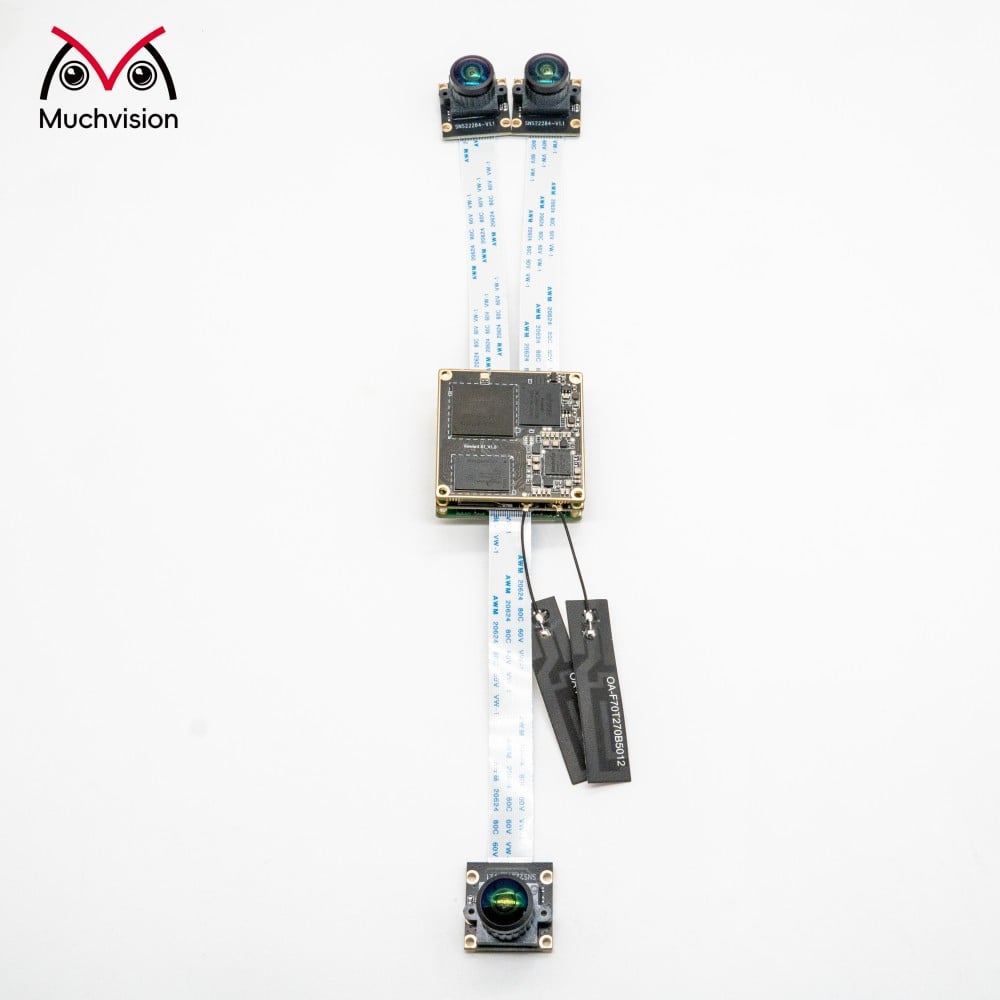
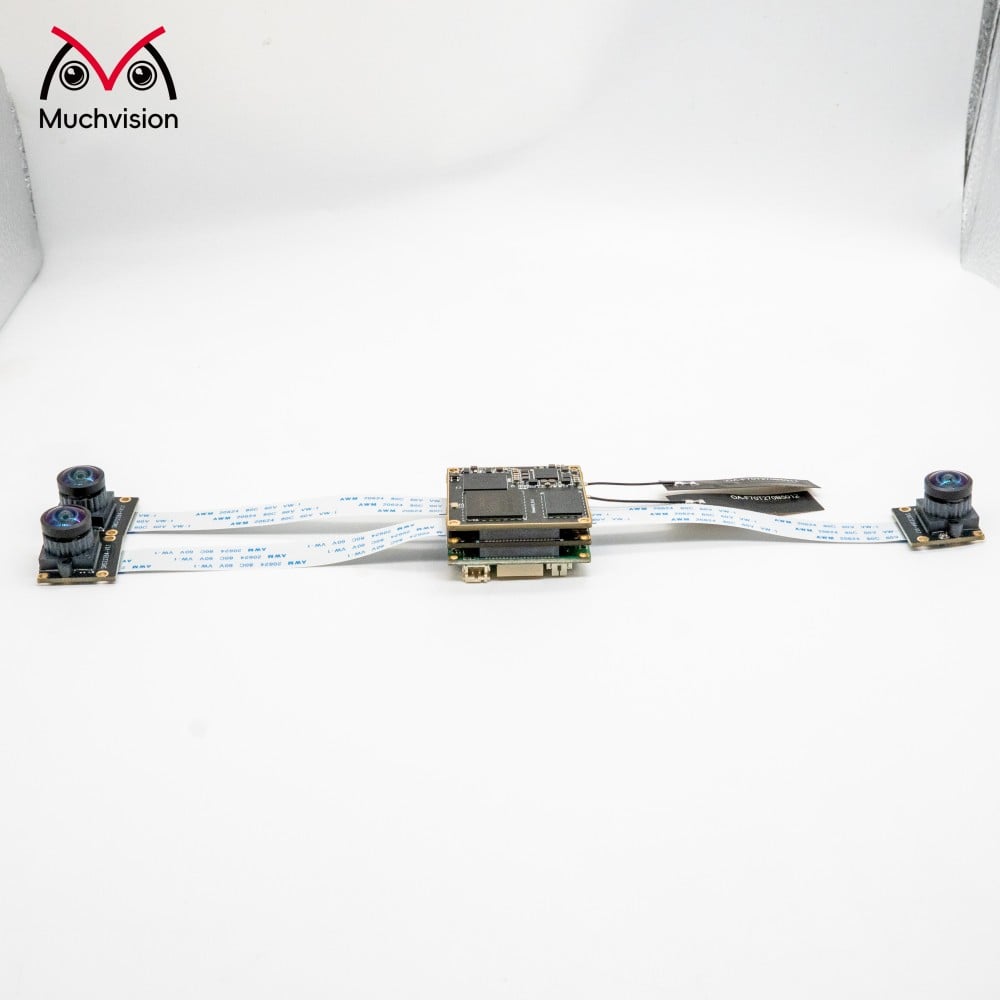
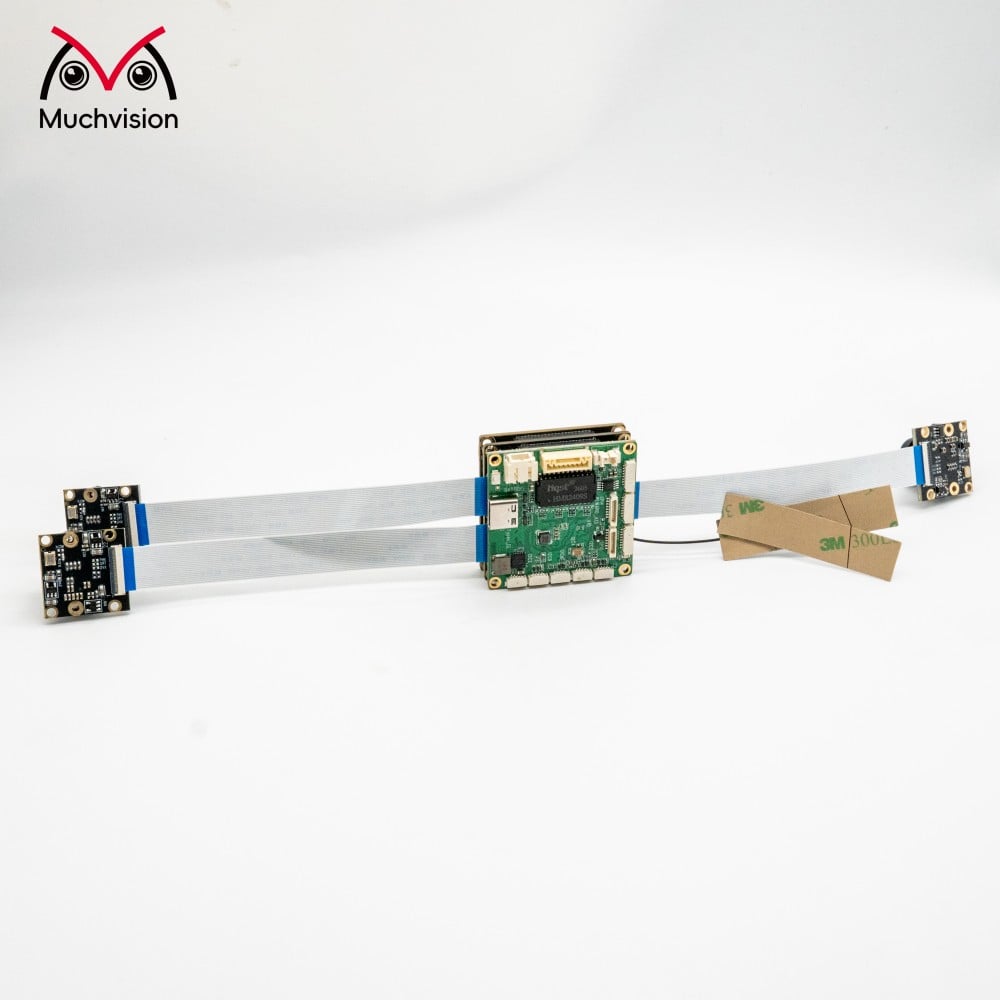
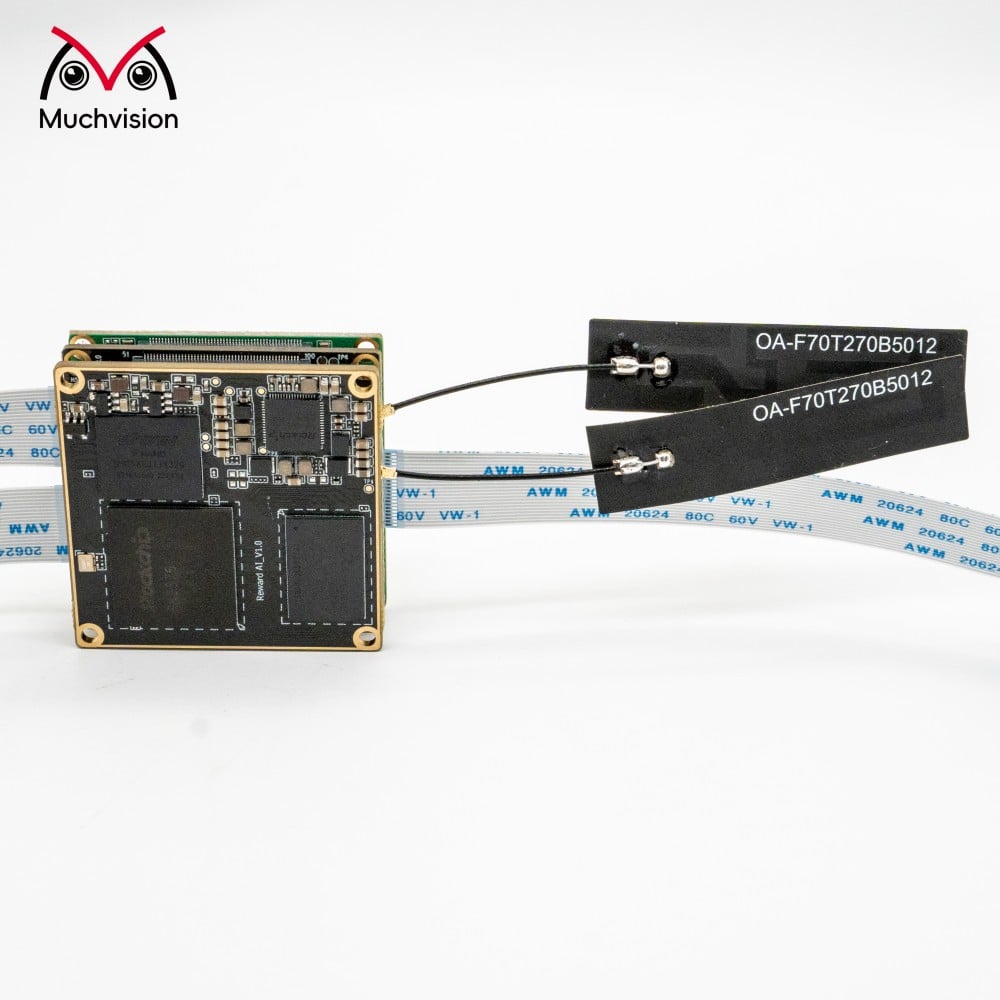
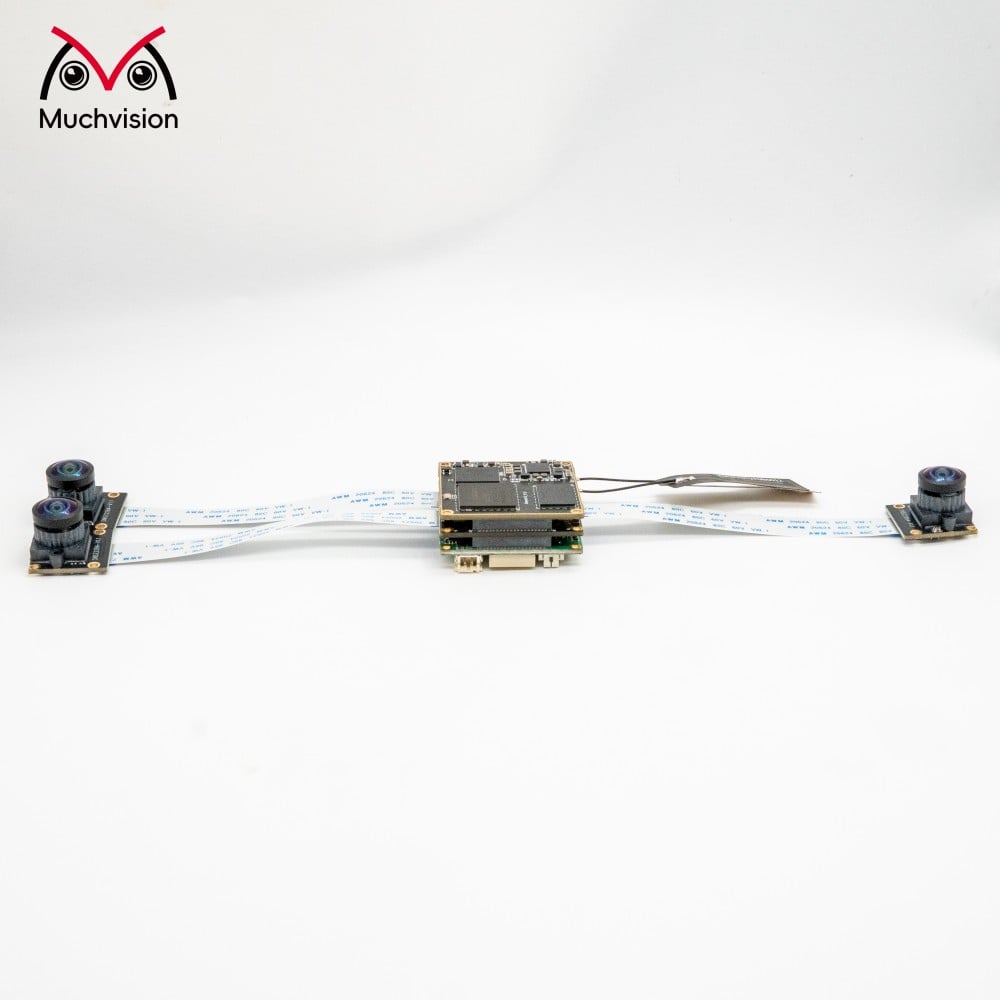
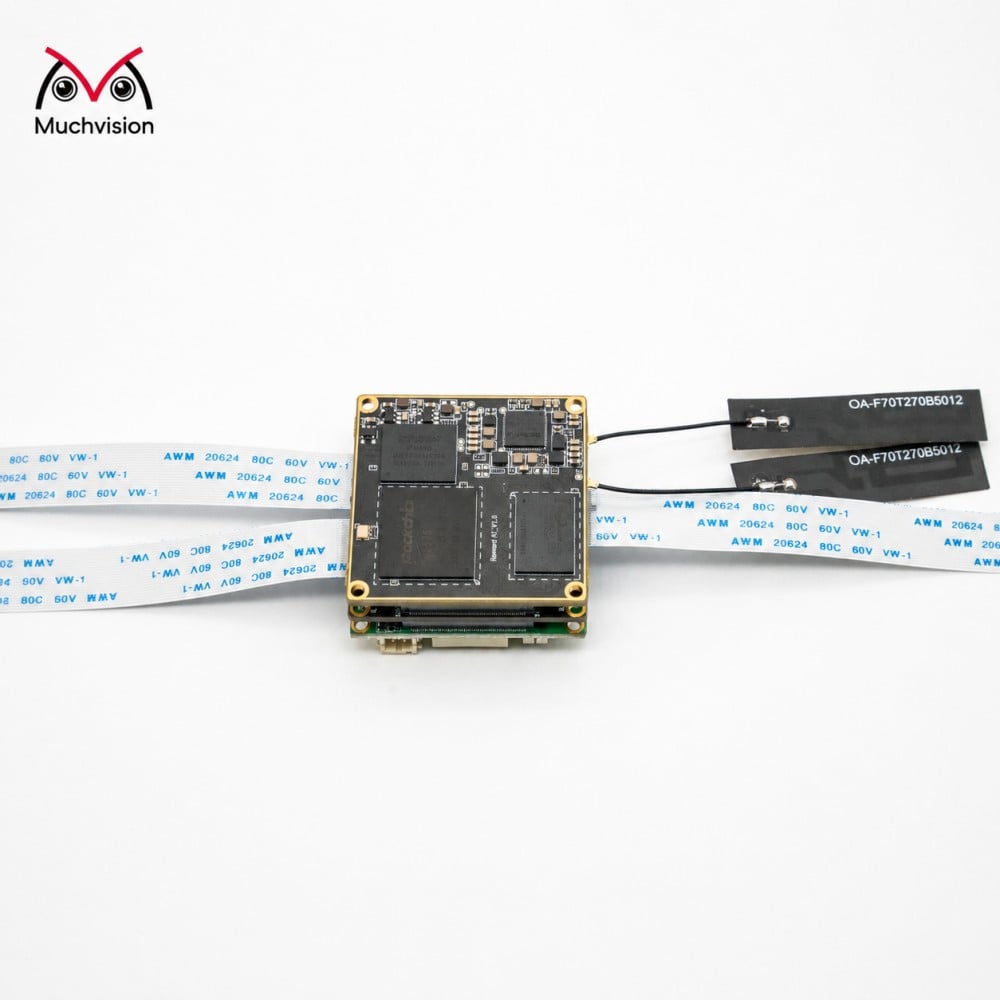
MV12-V1.0 To produkt to czterokanałowa zsynchronizowana platforma obliczeniowa do wizualnej i multimodalnej interakcji, oparta na wydajnym procesorze Rockchip RK3576. Zintegrowano w niej wysokiej precyzji jednostkę pomiarową ruchu (IMU – Inertial Measurement Unit) oraz cztery niezależne interfejsy kamerowe MIPI. Dzięki sprzętowemu mechanizmowi synchronizacji wyzwalania zapewnia ona zsynchronizowanie w czasie i przestrzeni danych wizyjnych z wielu kanałów oraz danych dotyczących położenia i ruchu na poziomie mikrosekund.
Wykorzystując potężną, ośmiordzeniową heterogeniczną architekturę procesora RK3576 oraz jego możliwości obliczeniowe w zakresie sztucznej inteligencji, system ten nie tylko obsługuje równoległe przetwarzanie wielu strumieni wideo w wysokiej rozdzielczości, ale także w czasie rzeczywistym wykonuje złożone algorytmy mapowania SLAM, lokalizacji VIO oraz wnioskowania AI na brzegu sieci. Zapewnia to solidne podstawy danych do dokładnej percepcji w dynamicznych środowiskach.
Platforma charakteryzuje się wyjątkową zgodnością z czujnikami oraz elastycznością w różnych scenariuszach, umożliwiając swobodny wybór popularnych, wysokowydajnych czujników w celu budowy dostosowanych rozwiązań percepcyjnych. Jest zgodna z różnymi czujnikami działającymi w warunkach niskiej oświetlenia oraz z czujnikami globalnego migotania (global shutter), w tym IMX662, IMX464, OV9281 i AR0234. W połączeniu z sześciopłaszczyznową kompensacją orientacji zapewnianą przez wbudowany układ IMU system zachowuje wysoką precyzję lokalizacji własnej i percepcji otoczenia nawet w ekstremalnych warunkach, takich jak brak sygnału GPS lub gwałtowne zmiany oświetlenia. Ponadto płyta główna posiada bogaty zestaw interfejsów rozszerzeń SPI i I2C oraz wbudowane wsparcie dla macierzy mikrofonów, głośników oraz modułów zarządzania ładowaniem baterii. Ten wysoko zintegrowany projekt nadaje urządzeniu zdolność „słuchania” i „mówienia”, przekształcając je z pojedynczego terminala percepcji wizualnej w inteligentne urządzenie zdolne do interakcji głosowej, przekazywania informacji o stanie oraz mobilnej pracy, co znacznie upraszcza złożoność projektowania obwodów peryferyjnych.
Dzięki kompleksowym zaletom takim jak «wysoka moc obliczeniowa + fuzja wielu czujników + synchronizacja sprzętowa + bogata interakcja» ten produkt szeroko wspiera najnowocześniejsze dziedziny, takie jak sztuczna inteligencja z materialnym wyrazem (Embodied AI), inspekcja przemysłowa oraz jazda autonomiczna. W zastosowaniach robotów humanoidów pełni funkcję podstawowej jednostki percepcyjnej, umożliwiając unikanie przeszkód w skali milisekund oraz precyzyjne chwyty po połączeniu z kamerami z globalnym migotaniem (global shutter), a także zapewnia naturalną interakcję człowiek–maszyna dzięki wbudowanemu modułowi głosowemu. W przypadku inspekcji przemysłowej w każdych warunkach świetlnych wykorzystuje czujniki klasy „gwiazdowej” (starlight), gwarantując bezpieczeństwo wizualne podczas operacji nocnych, a jednocześnie generując alarmy o nieprawidłowościach za pomocą wbudowanego głośnika. W dziedzinie niskoprędkościowej jazdy autonomicznej i pojazdów logistycznych osiąga widok panoramiczny 360° oraz nawigację o wysokiej precyzji poprzez fuzję obrazów z wielu kamer. Niezależnie od zastosowania w badaniach i rozwoju czy w komercyjnej wdrożeniach, ta platforma stanowi idealny wybór do rozwiązywania złożonych wyzwań związanych z widzeniem maszynowym oraz poszerzania granic interakcji.
Zastosowania
Produkty terminalowe z funkcją wizualną przeznaczone dla sektorów finansów, mediów, płatności, handlu detalicznego, sterowania przemysłowego, edukacji, administracji rządowej/przedsiębiorstw oraz opieki zdrowotnej. Nadają się do zastosowań takich jak roboty humanoidy, inteligentny handel detaliczny, kamery panoramiczne, magazynowanie bezobsługowe, inteligentne sortowanie i dostawa oraz zautomatyzowane urządzenia UAV.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Parametry standardowe
| Kluczowe parametry | |
| CPU | Ośmiordzeniowy 64-bitowy procesor (4×A72 + 4×A53) z maksymalną częstotliwością taktowania 2,2 GHz |
| GPU | G52 MC3 @ 1 GHz, obsługa OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | jednostka przetwarzania neuronowego (NPU) o mocy obliczeniowej 6 TOPS, obsługująca operacje INT4/INT8/INT16/FP16/BF16/TF32; umożliwia współpracę dwóch rdzeni lub niezależną pracę każdego z nich; obsługuje wielozadaniowość oraz przetwarzanie równoległe w różnych scenariuszach |
| Isp | Wbudowany procesor obrazu (ISP) o rozdzielczości 16 Mpix, wspierający redukcję szumów w warunkach niskiej osвещенности, czujnik RGB-IR oraz zakres dynamiki HDR do 120 dB. AI-ISP poprawia jakość obrazu dzięki zmniejszeniu poziomu szumów. |
| pamięć | LPDDR4/LPDDR4x/LPDDR5 (opcjonalnie 4 GB/8 GB/16 GB) |
| Pamięć wewnętrzna | eMMC (opcjonalnie 16 GB/32 GB/64 GB/128 GB/256 GB) |
| Kodowanie wideo | Dekodowanie wideo: 8K@30 fps / 4K@120 fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60 fps (H.264/AVC) Dekodowanie wideo: 4K@60 fps (H.265/HEVC, H.264/AVC) Dekodowanie obrazów: 4K@60 fps MJPG |
| moc | DC 5V |
| System operacyjny | Obsługa jądra RTLinux zapewniającego doskonałą wydajność w czasie rzeczywistym, powszechnie stosowanego w zastosowaniach przemysłowych. Obsługa systemu operacyjnego Linux oraz Buildroot, zapewniająca bezpieczne i stabilne środowisko systemowe do rozwoju i produkcji produktów. Urządzenie oferuje nowe funkcje przemysłowe, takie jak sieciowanie w czasie rzeczywistym, interfejs Flexbus, izolacja zasobów sprzętowych oraz DSMC, spełniając różnorodne wymagania aplikacji przemysłowych. |
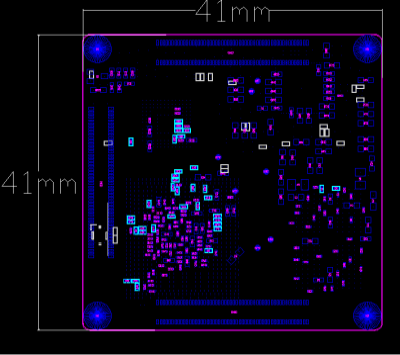
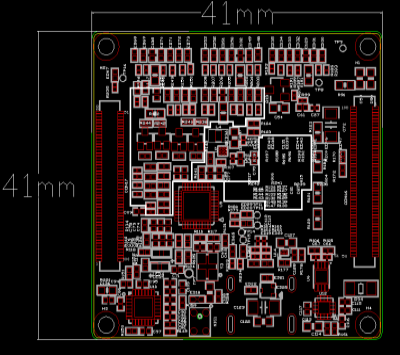
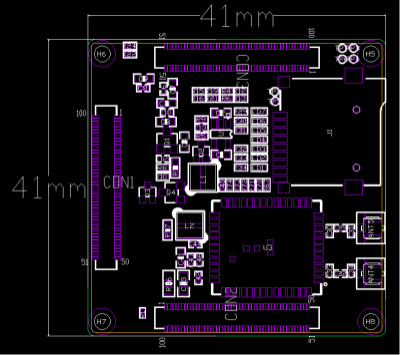
| rozmiar | 41 mm × 41 mm × 20 mm |
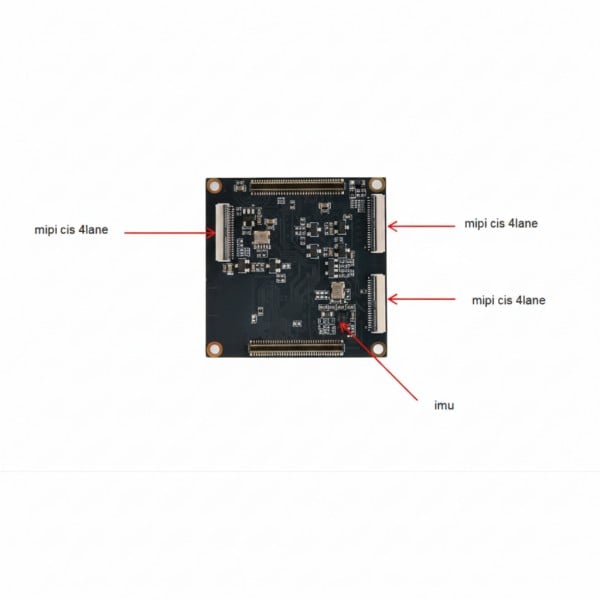
| Kamera wspierająca | interfejs MIPI o 3 kanałach i 2 liniach: OV9281, IMX662, AR0234, IM464 itp., z możliwością dostosowania |
| Żyroskop IMU | 4 żyroskopy serii TDK ICM42670 |
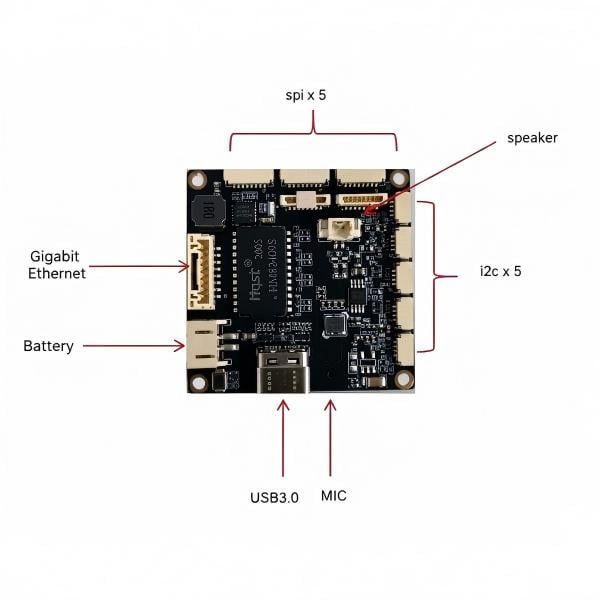
| Ethernet | 1 × port Gigabit Ethernet (podłączany za pośrednictwem gniazda typu Wafer 8P-1,25 mm) |
| Wi-Fi / PDA | Wyposażony w wbudowany moduł Wi-Fi obsługujący dwupasmowe Wi-Fi 6 (802.11a/b/g/n/ac/ax) na częstotliwościach 2,4 GHz i 5 GHz oraz obsługę Bluetooth. |
| USB | 1 zewnętrzny port USB 3.0 typu C (obsługuje ADB) |
| antena | Trasa 1 |
| przycisk | Przycisk 1 |
| Interfejsem SPI | 5szt |
| Interfejs I2C | 5szt |
| Mikrofon | 1 cyfrowy mikrofon |
| Głośnik | Sygnał dźwiękowy trasy 1 (2-pinowy, odległość między stykami: 1,25 mm) |
Rozmiar płyty głównej
 |
 |
 |
Opis interfejsu
 |
 |
Środki ostrożności
Charakterystyki środowiskowe
Temperatura
Działanie: 0 ℃ do +40 ℃
Przechowywanie: -20 ℃ do +70 ℃
Wilgotność podczas przechowywania
Działanie: 10–90 % (bez skroplenia)
Przechowywanie: 5–95 % (bez skroplenia)
Wysokość
Działanie: do 3048 m n.p.m. (maks.)
Przechowywanie: do 6096 m n.p.m. (maks.)
Wysoka temperatura i przechowywanie
Metoda i warunki testu – patrz opis normy GB2423.2 „Test Bd i Bb”
Niska temperatura i przechowywanie
Metoda i warunki testu – patrz opis normy GB2423.1 „Test Ad i Ab”
Test wilgotności i temperatury
Metoda i warunki testu – patrz opis normy GB2423.3 „Test Ca” oraz GB2423.22 „Test Nb”
Ostrzeżenia dotyczące montażu i użytkowania
Podczas montażu i użytkowania należy zwrócić uwagę na następujące (choć nie tylko) punkty problemowe oraz sprawdzić je:



