






- Überblick
- Empfohlene Produkte
- PCBAs und elektronische Komponenten sind äußerst ESD-empfindlich. Die Bediener müssen vor dem Umgang mit Leiterplatten oder der Montage antistatische Armbänder oder Handschuhe tragen, um eine ordnungsgemäße Ableitung statischer Elektrizität sicherzustellen.
- Vermeiden Sie während des Einbaus und der Befestigung eine Verformung der Hauptplatine durch die Befestigung.
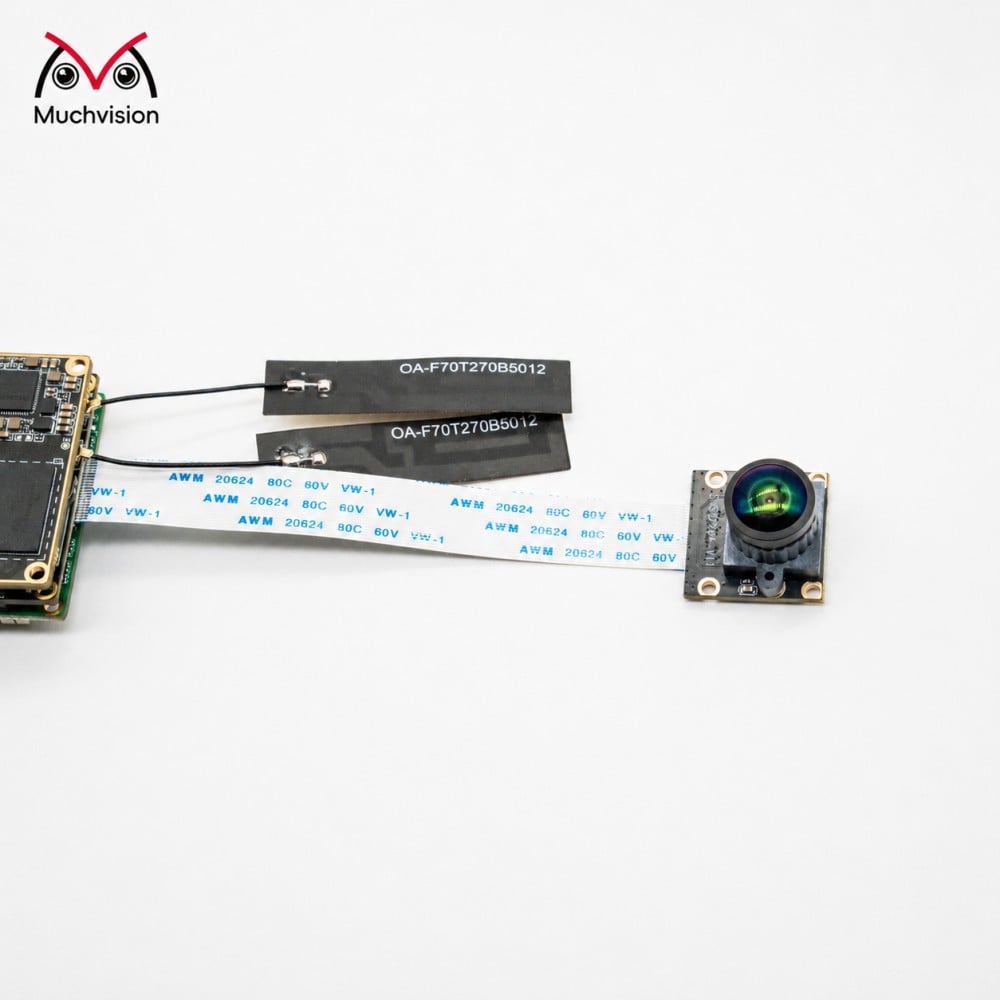
- Stellen Sie bei der Kameramontage eine korrekte Ausrichtung der MIPI-Schnittstelle sicher. Überprüfen Sie die Richtung von Pin 1.
- B2B-Steckverbinderbaugruppe: Befolgen Sie die Reihenfolge „zuerst stecken, dann schrauben“. Richten Sie die Steckverbinder aus und drücken Sie sie vollständig ineinander, bevor Sie die vier Schrauben an den Ecken festziehen. Dadurch wird sichergestellt, dass der Steckverbinder mechanische Vibrationsbelastungen aushält, während die Schrauben hauptsächlich das Gewicht tragen.;
- Achten Sie bei der Installation von Peripheriegeräten (USB, IO, ETC) auf die E/A-Pegel und die Stromausgabe der Peripheriegeräte;
- Achten Sie bei der Installation des seriellen Anschlusses darauf, ob RS232- und TTL-Geräte direkt miteinander verbunden sind, ob die Verbindungsweise von TX und RX korrekt ist und ob die Spannungsebene (Level) stimmt;
- Überprüfen Sie, ob die Eingangsspannung mit der Stromversorgungsschnittstelle verbunden ist und ob die Eingangsspannung, der Eingangsstrom usw. gemäß der Gesamtanzahl der angeschlossenen Peripheriegeräte den Anforderungen entsprechen.
Beschreibung
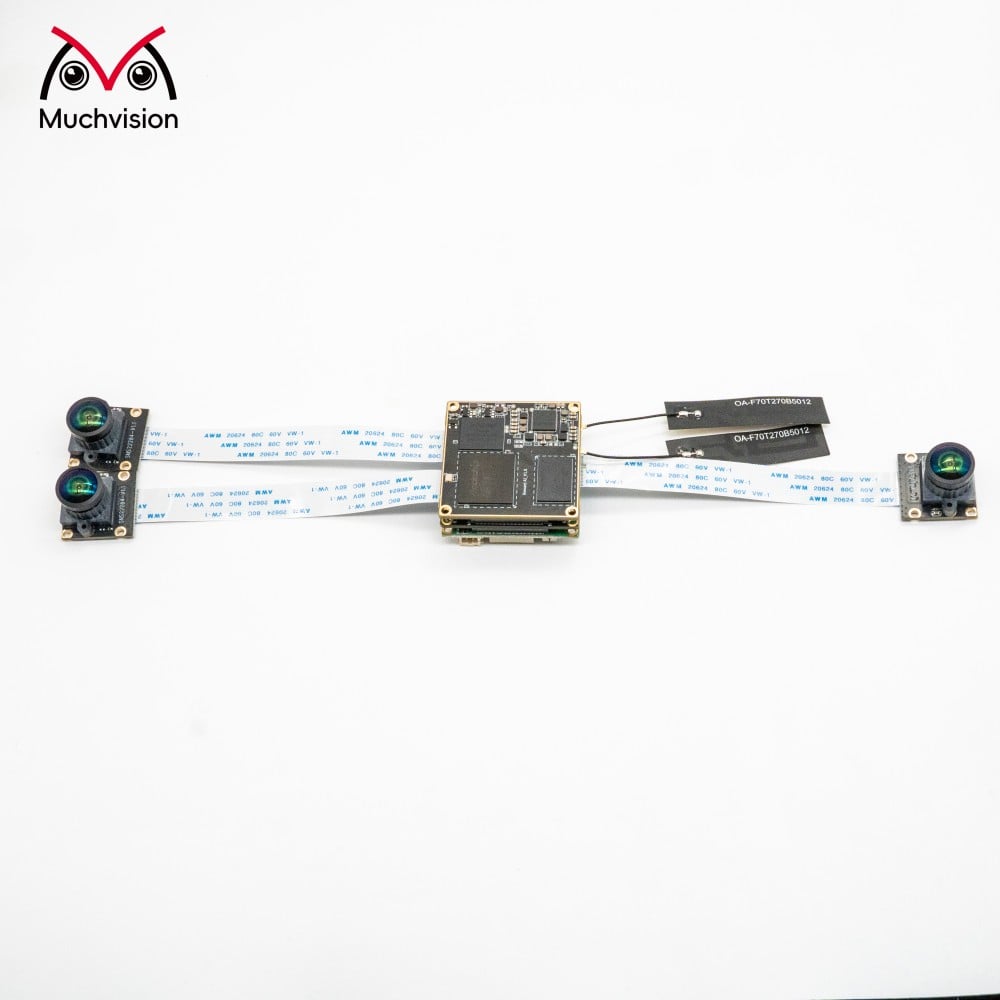
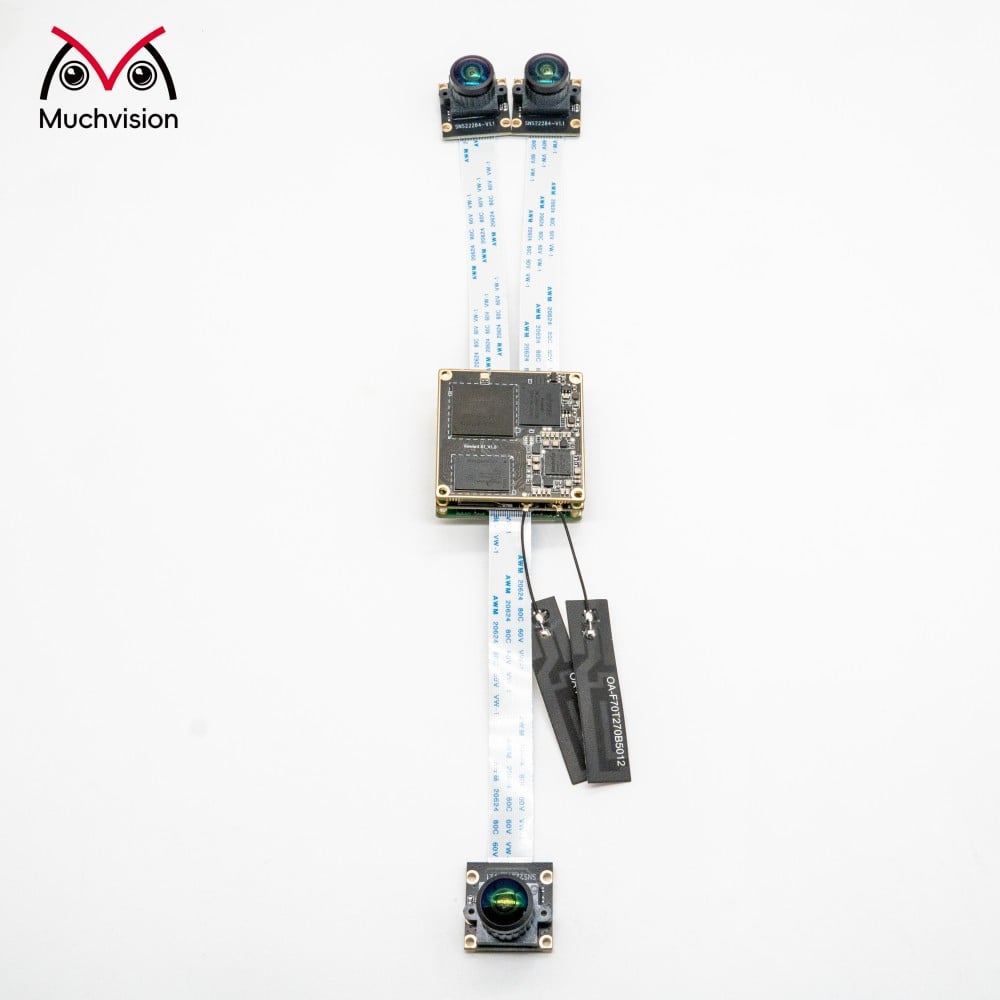
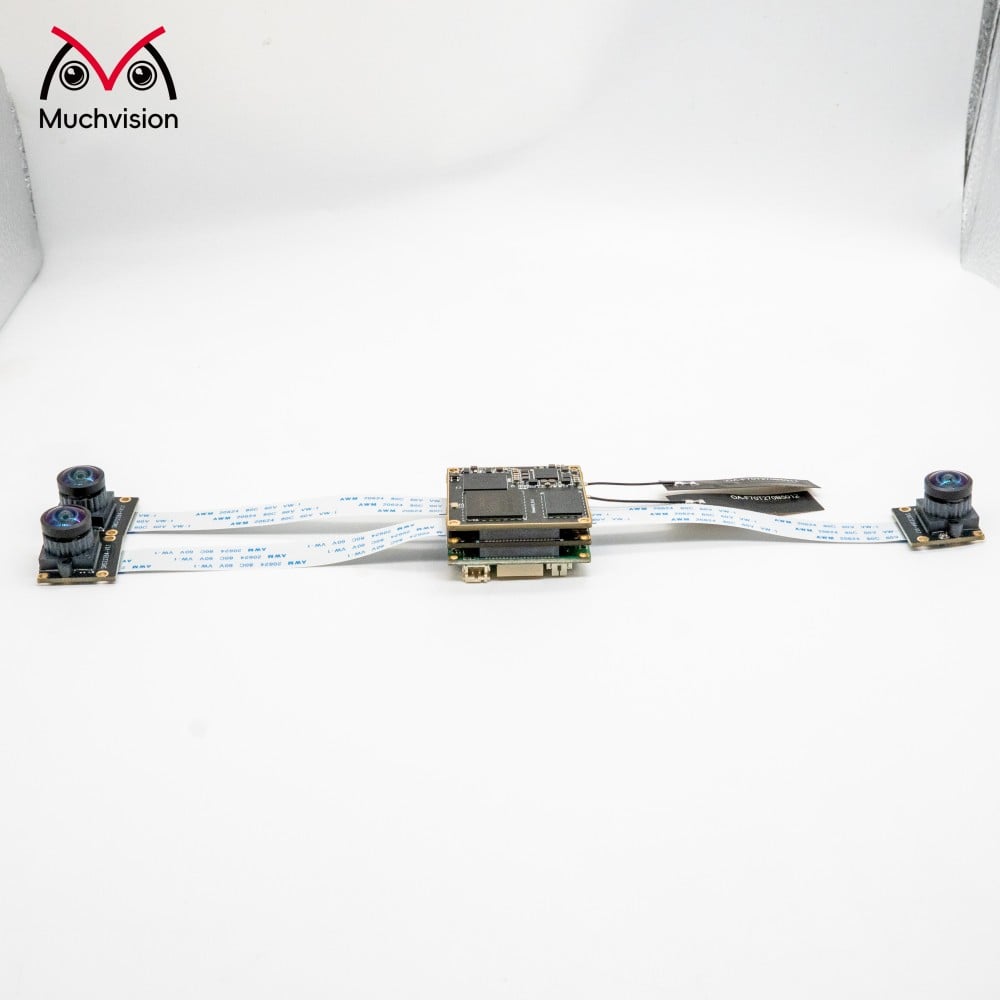
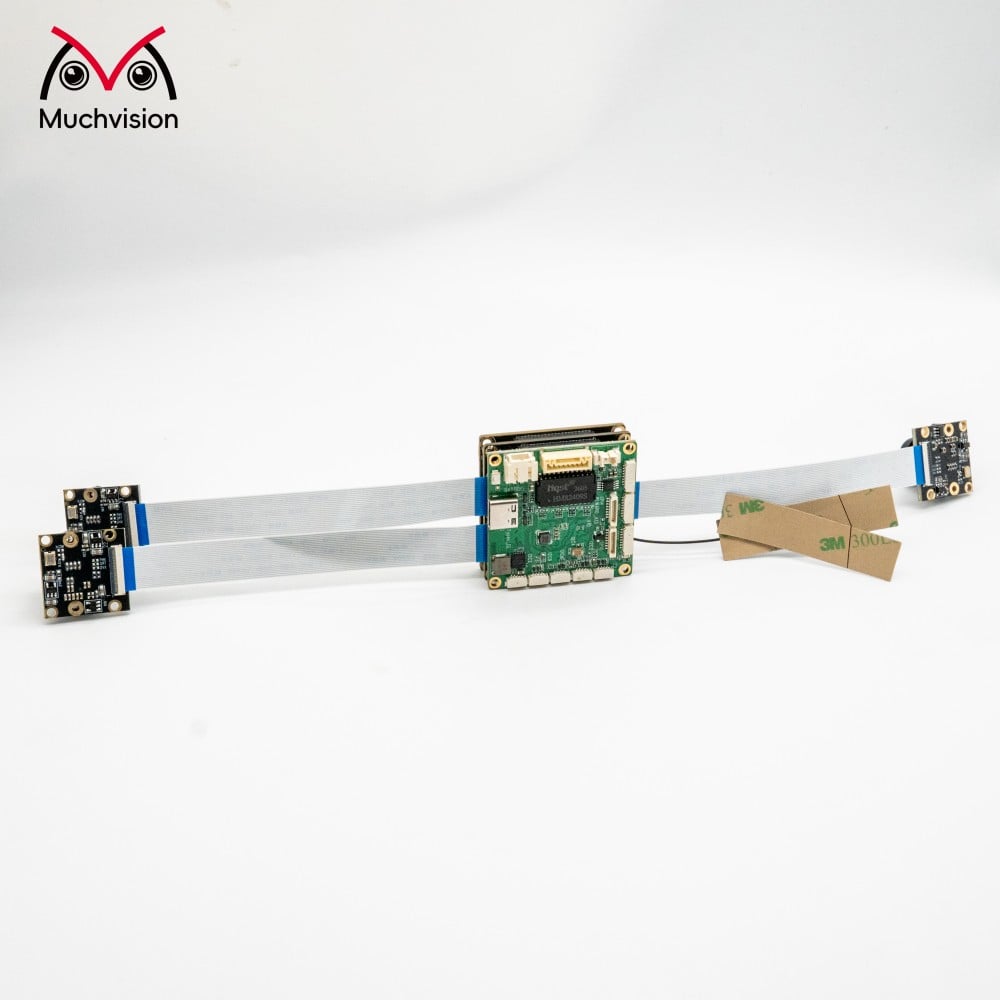
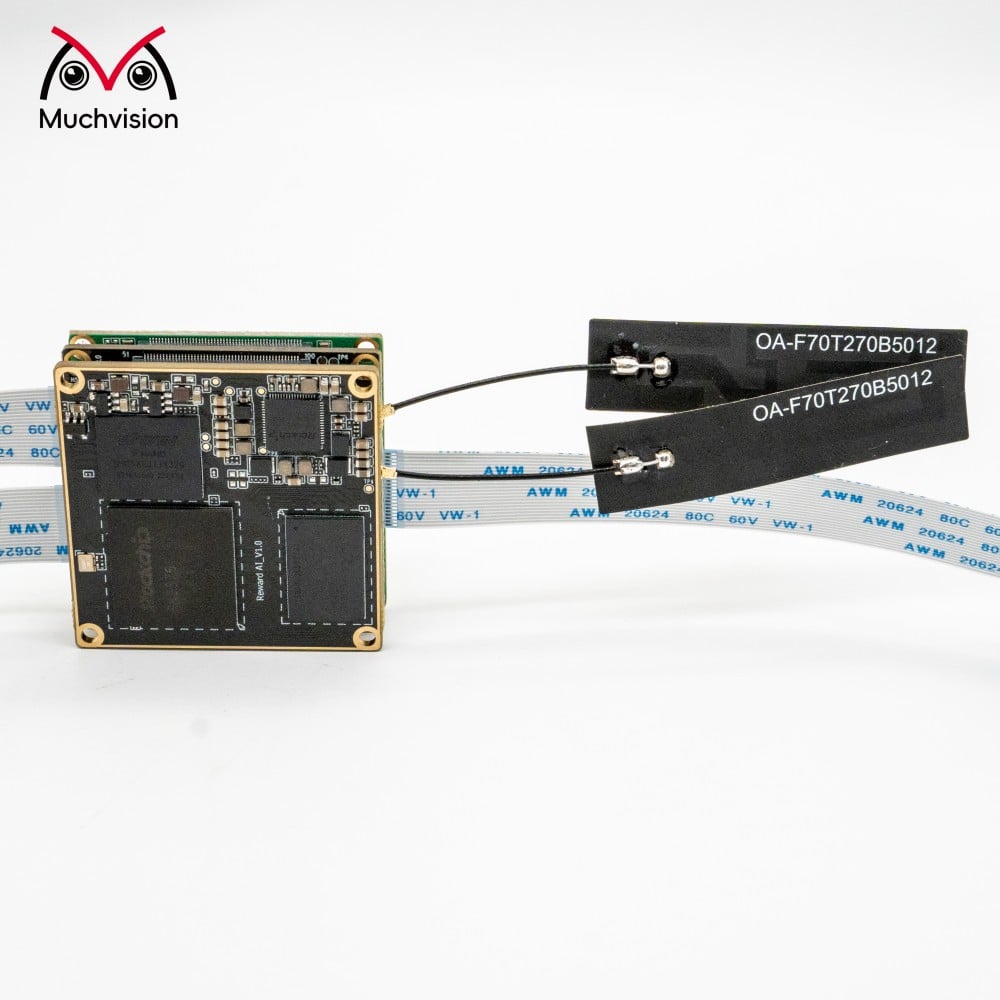
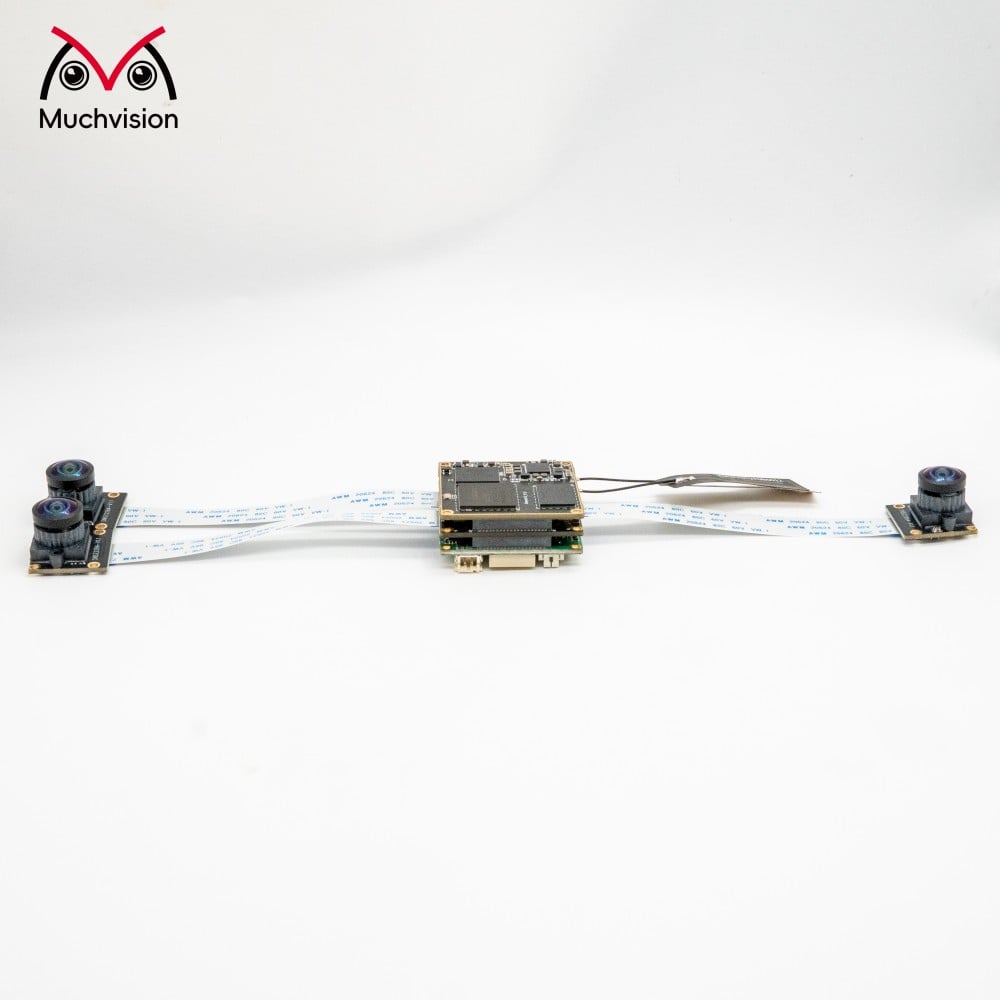
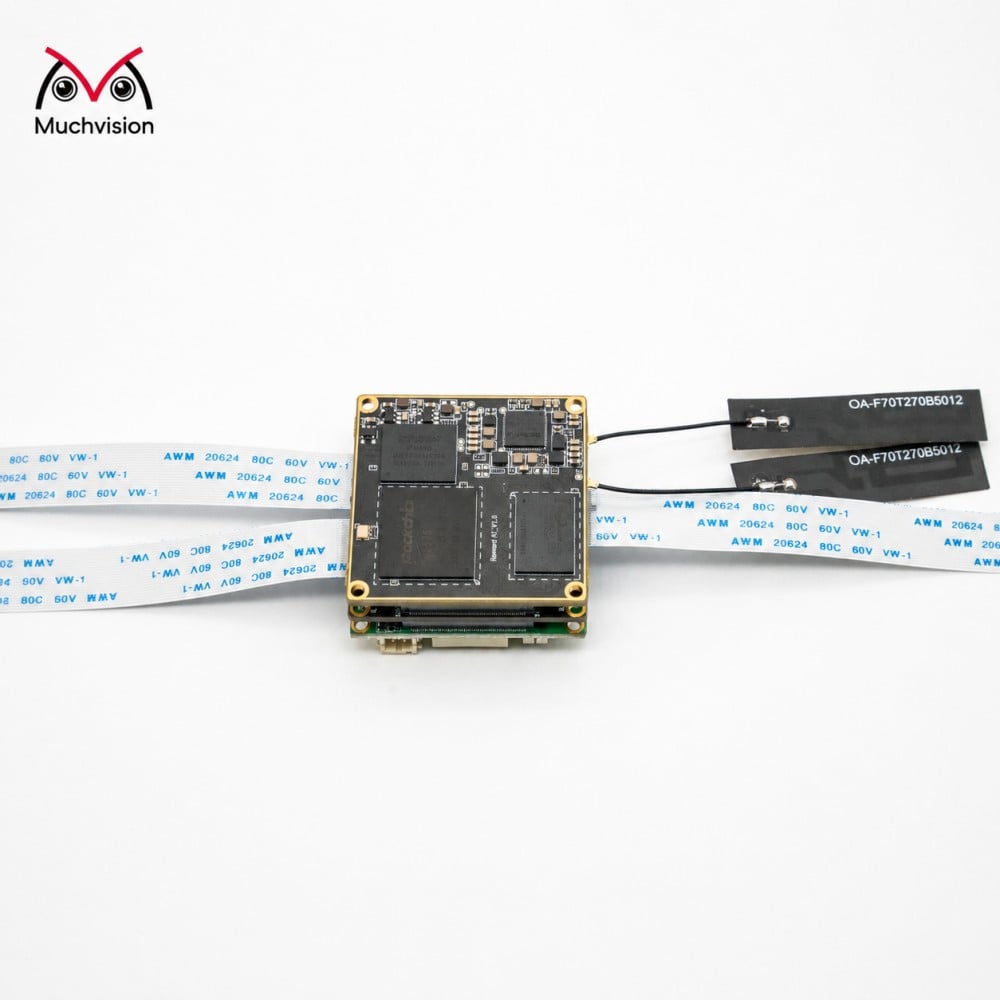
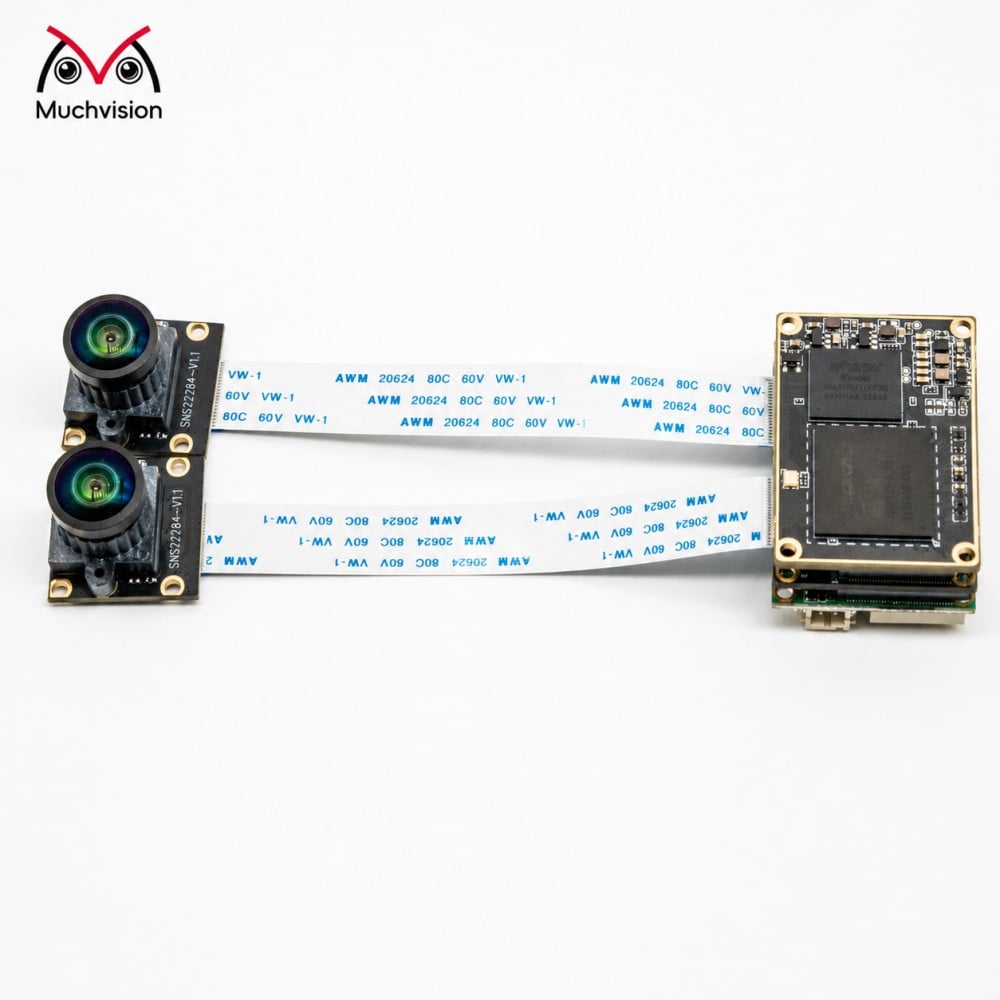
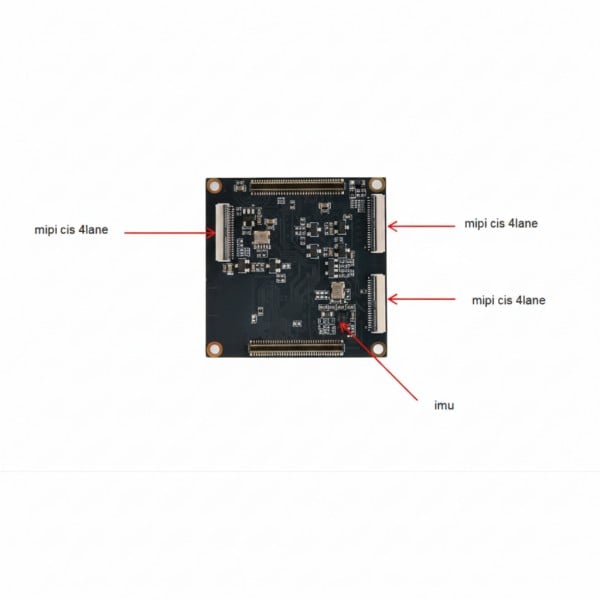
MV12-V1.0 Dieses Produkt ist eine vierkanalige, synchronisierte visuelle und multimodale Interaktions-Computing-Plattform, die auf dem leistungsstarken Rockchip RK3576-Prozessor basiert. Sie integriert eine hochpräzise IMU (Inertial Measurement Unit) mit vier unabhängigen MIPI-Kameraschnittstellen. Durch einen hardwareseitigen Synchronisationstriggermechanismus gewährleistet sie eine mikrosekundengenaue räumlich-zeitliche Ausrichtung zwischen mehrkanaligen visuellen Aufnahmen und Bewegungs- sowie Lagendaten.
Dank der leistungsstarken 8-Kern-heterogenen Architektur und der KI-Rechenleistung des RK3576 unterstützt das System nicht nur die parallele Verarbeitung mehrerer HD-Videostreams, sondern führt zudem komplexe SLAM-Mapping-, VIO-Lokalisierungs- und KI-Inferenz-Algorithmen in Echtzeit am Edge aus. Damit bildet es eine solide Datenbasis für präzise Wahrnehmung in dynamischen Umgebungen.
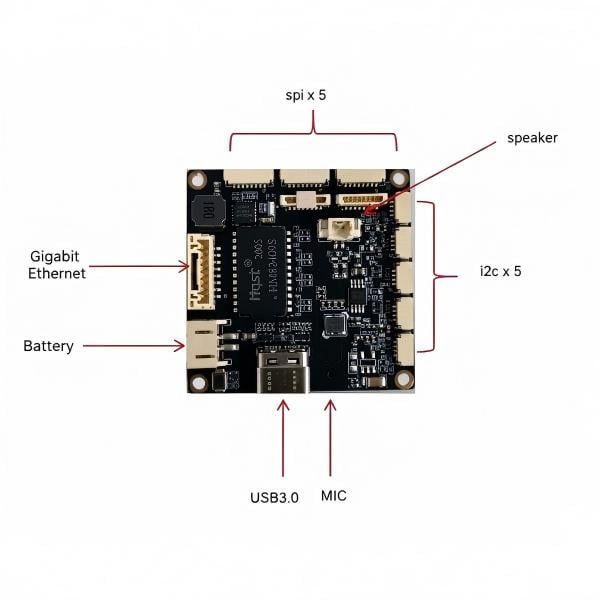
Die Plattform zeichnet sich durch außergewöhnliche Sensor-Kompatibilität und Anpassungsfähigkeit an verschiedene Szenarien aus und unterstützt die flexible Auswahl gängiger Hochleistungssensoren zur Erstellung maßgeschneiderter Wahrnehmungslösungen. Sie ist kompatibel mit einer Vielzahl von Sensoren für schwaches Licht und Global-Shutter-Sensoren, darunter der IMX662, IMX464, OV9281 und AR0234. In Kombination mit der 6-Achsen-Lagekompensation, die vom integrierten IMU bereitgestellt wird, gewährleistet das System auch unter extremen Bedingungen – wie beispielsweise in GPS-verwehrten Umgebungen oder bei starken Lichtveränderungen – eine hochpräzise Eigenlokalisierung sowie Umgebungswahrnehmung. Darüber hinaus verfügt die Hauptplatine über zahlreiche reservierte SPI- und I²C-Erweiterungsschnittstellen sowie native Unterstützung für Mikrofonarrays, Lautsprecher und Module für das Batterielademanagement. Durch dieses hochgradig integrierte Design erhält das Gerät die Fähigkeit, zu „hören“ und zu „sprechen“, wodurch es von einem rein visuellen Wahrnehmungsterminal zu einem intelligenten Gerät mit Sprachinteraktion, Statusrückmeldung und mobiler Betriebsfähigkeit aufgewertet wird – was die Komplexität des Peripherieschaltungsdesigns erheblich vereinfacht.
Mit den umfassenden Vorteilen von »hoher Rechenleistung + Fusion mehrerer Sensoren + Hardware-Synchronisation + reichhaltiger Interaktion« ermöglicht dieses Produkt bahnbrechende Anwendungen in Bereichen wie Embodied AI, industrieller Inspektion und autonomem Fahren. In humanoiden Robotern fungiert es als zentrale Wahrnehmungseinheit: In Kombination mit Global-Shutter-Kameras ermöglicht es eine Hindernisvermeidung im Millisekundenbereich sowie ein präzises Greifen, während das integrierte Sprachmodul eine natürliche Mensch-Maschine-Interaktion gewährleistet. Für die allwettertaugliche industrielle Inspektion nutzt es Sensoren der Sternenlicht-Klasse, um bei Nachtoperationen visuelle Sicherheit zu gewährleisten, und liefert gleichzeitig über den eingebauten Lautsprecher Warnhinweise bei Auffälligkeiten. Im Bereich des autonomes Fahrens mit niedriger Geschwindigkeit sowie bei Logistikfahrzeugen realisiert es durch visuelle Fusion aus mehreren Kameras eine 360°-Rundumsicht und eine hochpräzise Navigation. Ob für Forschung und Entwicklung oder für den kommerziellen Einsatz – diese Plattform ist die ideale Wahl, um komplexe Herausforderungen im Bereich der Maschinenvision zu bewältigen und die Grenzen der Interaktion zu erweitern.
Anwendungsszenarien
Visuell-fähige Endgeräteprodukte für die Bereiche Finanzen, Medien, Zahlungsabwicklung, Einzelhandel, industrielle Steuerung, Bildung, Regierung/Unternehmen sowie Gesundheitswesen. Sie eignen sich für Anwendungsfelder wie humanoide Roboter, intelligenter Einzelhandel, Panoramakameras, automatisierte Lagerhaltung, intelligente Sortierung und Zustellung sowie automatisierte UAV-Ausrüstung.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Standardparameter
| Kernparameter | |
| CPU | Acht-Kern-64-Bit-Prozessor (4×A72 + 4×A53) mit einer maximalen Taktfrequenz von 2,2 GHz |
| GPU | G52 MC3 @ 1 GHz; unterstützt OpenGL ES 1.1/2.0/3.2, OpenCL 2.0 und Vulkan 1.1 |
| NPU | nPU mit einer Rechenleistung von 6 TOPS; unterstützt INT4/INT8/INT16/FP16/BF16/TF32-Operationen; ermöglicht Dual-Core-Zusammenarbeit oder unabhängigen Betrieb; unterstützt Multitasking und parallele Verarbeitung in verschiedenen Szenarien |
| Isp | Ausgestattet mit einem integrierten 16-Megapixel-ISP zur Rauschunterdrückung bei schwachem Licht, einem RGB-IR-Sensor und bis zu 120 dB HDR. Der KI-basierte ISP verbessert die Bildqualität durch reduziertes Rauschen. |
| erinnerung | LPDDR4/LPDDR4x/LPDDR5 (optional: 4 GB/8 GB/16 GB) |
| Eingebauter Speicher | eMMC (optional: 16 GB/32 GB/64 GB/128 GB/256 GB) |
| Video-Codierung | Video-Dekodierung: 8K@30 fps / 4K@120 fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60 fps (H.264/AVC) Video-Dekodierung: 4K@60 fps (H.265/HEVC, H.264/AVC) Bild-Dekodierung: 4K@60 fps MJPG |
| leistung | Gleichstrom 5V |
| Betriebssystem | Unterstützt den RTLinux-Kernel mit hervorragender Echtzeit-Leistung und wird weitläufig in industriellen Anwendungen eingesetzt. Unterstützt Linux-Betriebssysteme und Buildroot, um eine sichere und stabile Systemumgebung für die Produktentwicklung und -produktion bereitzustellen. Bietet neue industrielle Funktionen wie Echtzeit-Netzwerkkommunikation, Flexbus, Hardware-Ressourcen-Isolation und DSMC, um vielfältige Anforderungen industrieller Anwendungen zu erfüllen. |
| größe | 41 mm × 41 mm × 20 mm |
| Unterstützt Kamera | 3-Kanal-, 2-Lane-MIPI-Schnittstelle: OV9281, IMX662, AR0234, IM464 usw., unterstützt Individualanpassung |
| IMU-Gyroskop | 4 Gyroskope der TDK-Serie ICM42670 |
| Ethernet | 1 × Gigabit-Ethernet-Anschluss (angeschlossen über eine 8P-1,25-mm-Wafer-Buchse) |
| WLAN/PDA | Ausgestattet mit einem integrierten WLAN-Modul, das Dual-Band-WLAN 6 (802.11a/b/g/n/ac/ax) bei 2,4 GHz und 5 GHz sowie Bluetooth-Unterstützung bietet. |
| USB | 1 externer USB-3.0-Typ-C-Anschluss (unterstützt ADB) |
| antenne | Route 1 |
| druckknopf | Taste 1 |
| SPI-Schnittstelle | 5Stück |
| I2C-Schnittstelle | 5Stück |
| Mikrofon | 1 digitales Mikrofon |
| Lautsprecher | Hupe für Route 1 (2-polig mit 1,25 mm Abstand zwischen den Anschlüssen) |
Größe der Hauptplatine
 |
 |
 |
Schnittstellenbeschreibung
 |
 |
Vorsichtsmaßnahmen
Umwelteigenschaften
Temperatur
Betrieb: 0 °C bis +40 °C
Lagerung: −20 °C bis +70 °C
Luftfeuchtigkeit bei Lagerung
Betrieb: 10 % bis 90 % (nicht kondensierend)
Lagerung: 5 % bis 95 % (nicht kondensierend)
Höhenlage
Betrieb: bis zu 3.048 m (max.)
Lagerung: bis zu 6.096 m (max.)
Hohe Temperatur und Lagerung
Prüfverfahren und -bedingungen siehe Beschreibung der Norm GB2423.2 „Prüfung Bd & Bb“
Niedrige Temperatur und Lagerung
Prüfverfahren und -bedingungen siehe Beschreibung der Norm GB2423.1 „Prüfung Ad & Ab“
Feuchte- und Temperaturprüfung
Prüfverfahren und -bedingungen siehe Beschreibung der Normen GB2423.3 „Prüfung Ca“ und GB2423.22 „Prüfung Nb“
Hinweise zur Montage und Verwendung
Während der Montage und Verwendung sind folgende (nicht abschließend genannte) Problemstellen besonders zu beachten und zu überprüfen:



