






- סקירה כללית
- מוצרים מומלצים
- רכיבי PCB ורכיבים אלקטרוניים רגישים מאוד ללחצי סטטי. על המפעילים ללבוש צמידי עקביות נגד חשמל סטטי או כפפות נגד חשמל סטטי לפני נגיעה בלוחות או בהרכבה, כדי להבטיח פיזור תקין של מטען סטטי.;
- במהלך תהליך ההתקנה והחיזוק, יש להימנע מעוות הלוח האם שנגרם בגלל הפעולה של החיזוק;
- לבדוק את יישור ממשק MIPI הנכון בעת התקנת המצלמה. לאשר את הכיוון של פין 1;
- הרכבת מחבר B2B: לעקוב אחר הסדר "להתחבר קודם, לחזק באביזרים לאחר מכן". יש לכוון וללחוץ על המחברות כדי לחברן לחלוטין לפני שמיידים את ארבעת הבולטים בפינות. פעולה זו מבטיחה שהמחבר מסוגל לעמוד במתחים הנגרמים מרעידה, בעוד שהבולטים תומכים בעיקר במשקל.;
- בעת התקנת פריפריה (USB, IO, ETC), יש להתייחס לבעיות של רמות ה-IO של הפריפריה וזרם הפלט;
- בעת התקנת פורט הרצף, יש לבדוק אם מכשירי RS232 ו-TTL מחוברים ישירות זה לזה, אם שיטות החיבור של TX ו-RX נכונות, ואם רמת המתח מתאימה;
- האם כבל ההזנה מחובר לממשק קלט החשמל, והאם מתח ההזנה, הזרם וכו' עומדים בדרישות בהתאם לכל ההתקן החיצוניים.
תיאור
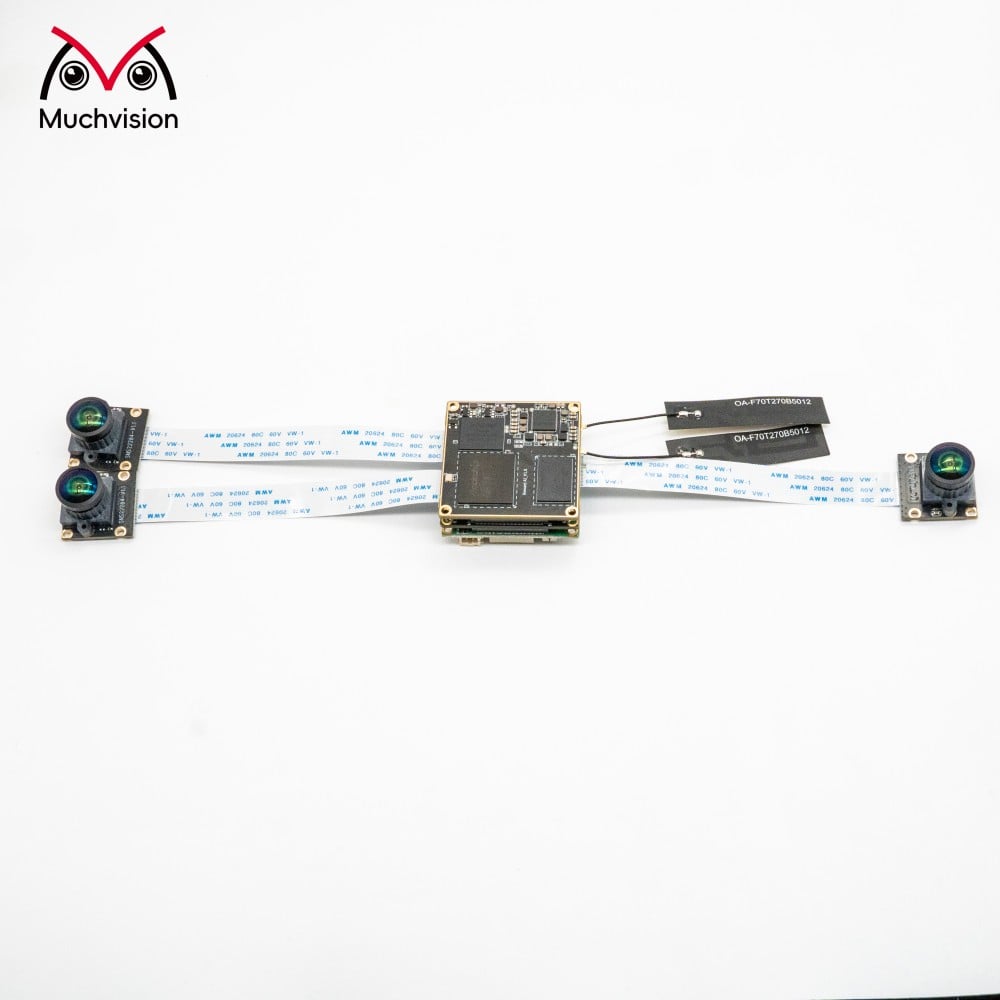
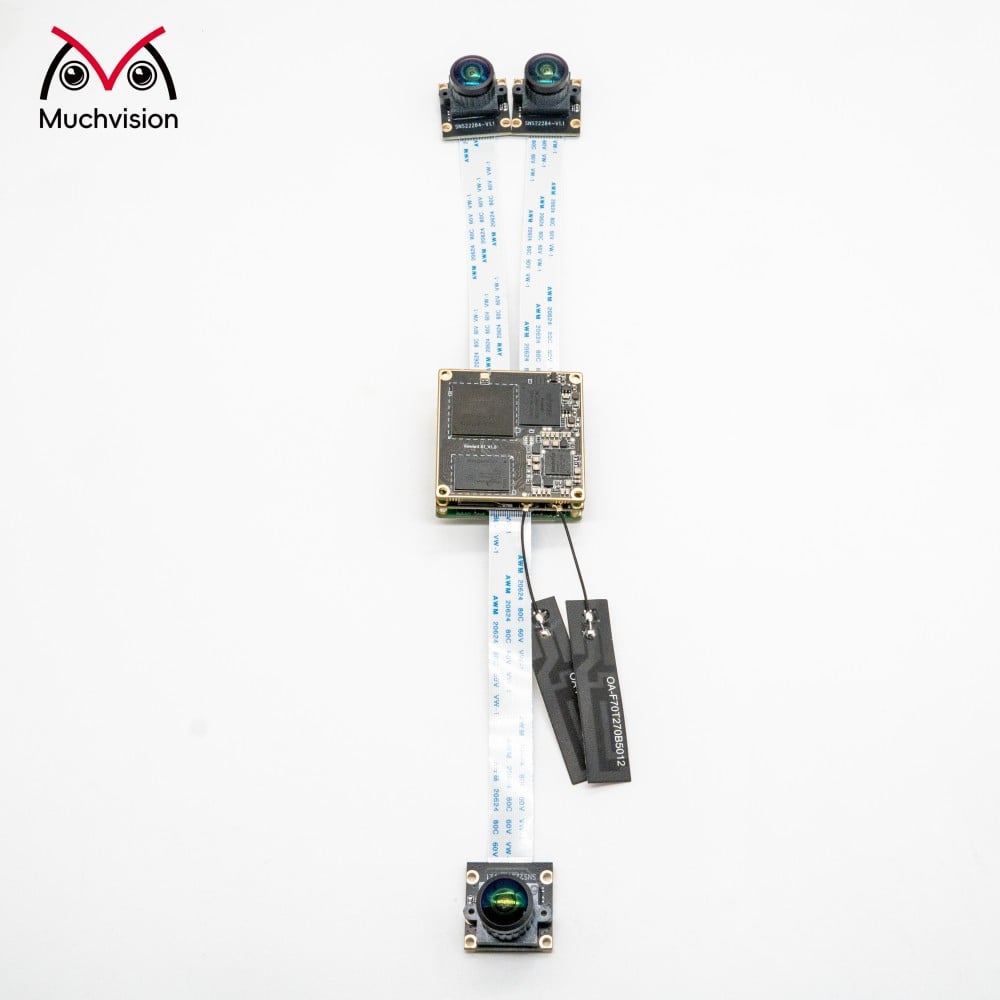
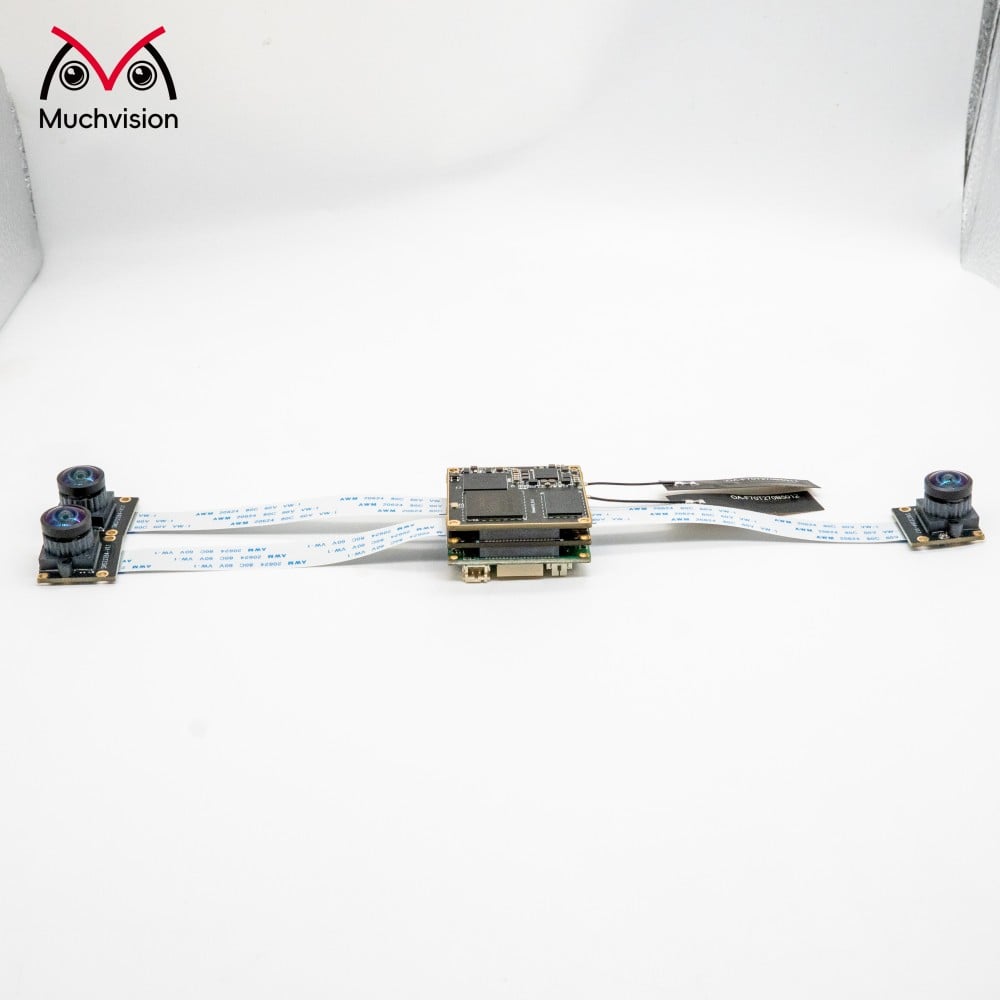
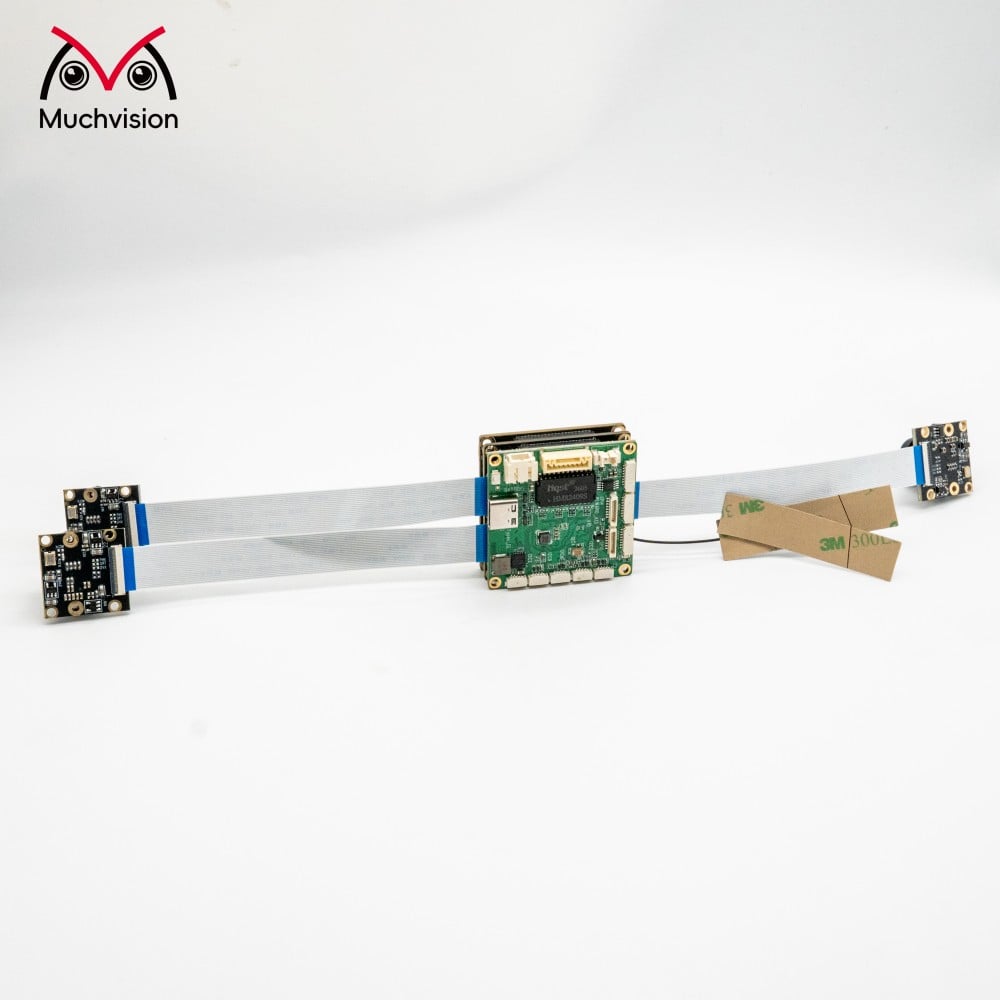
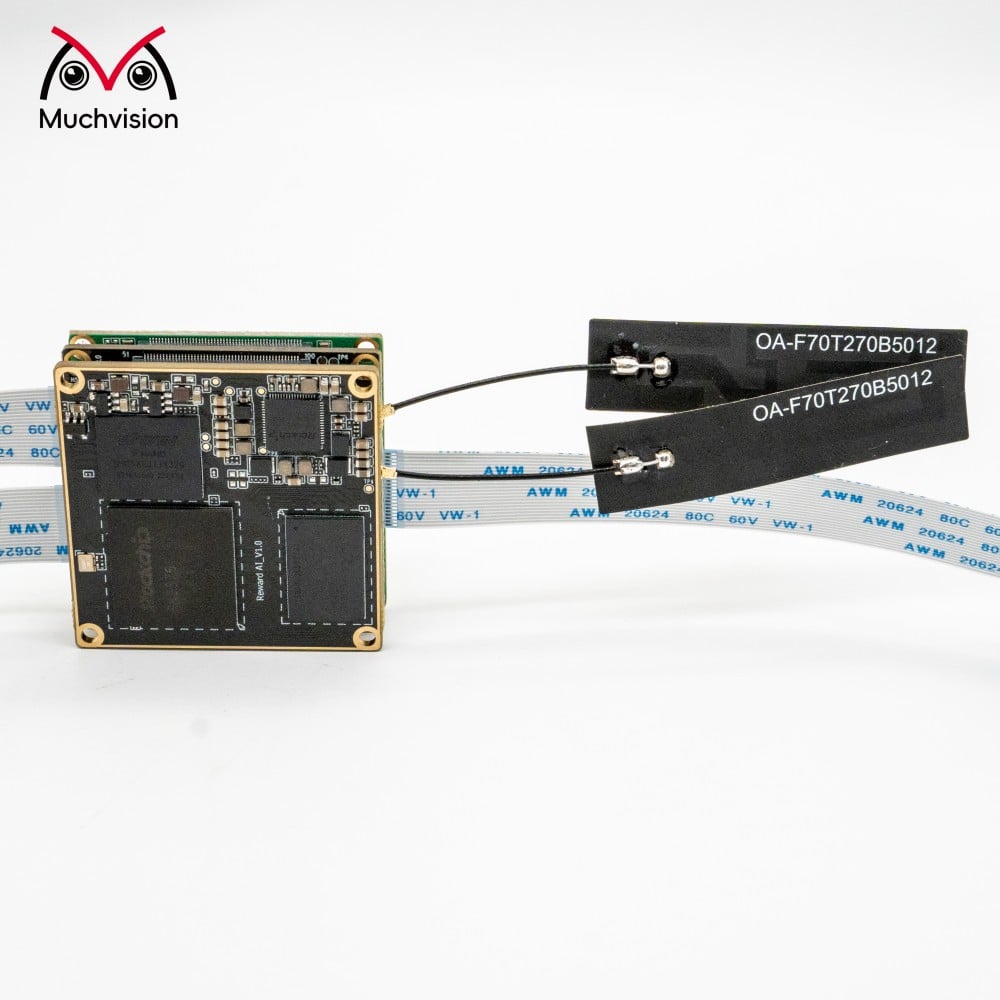
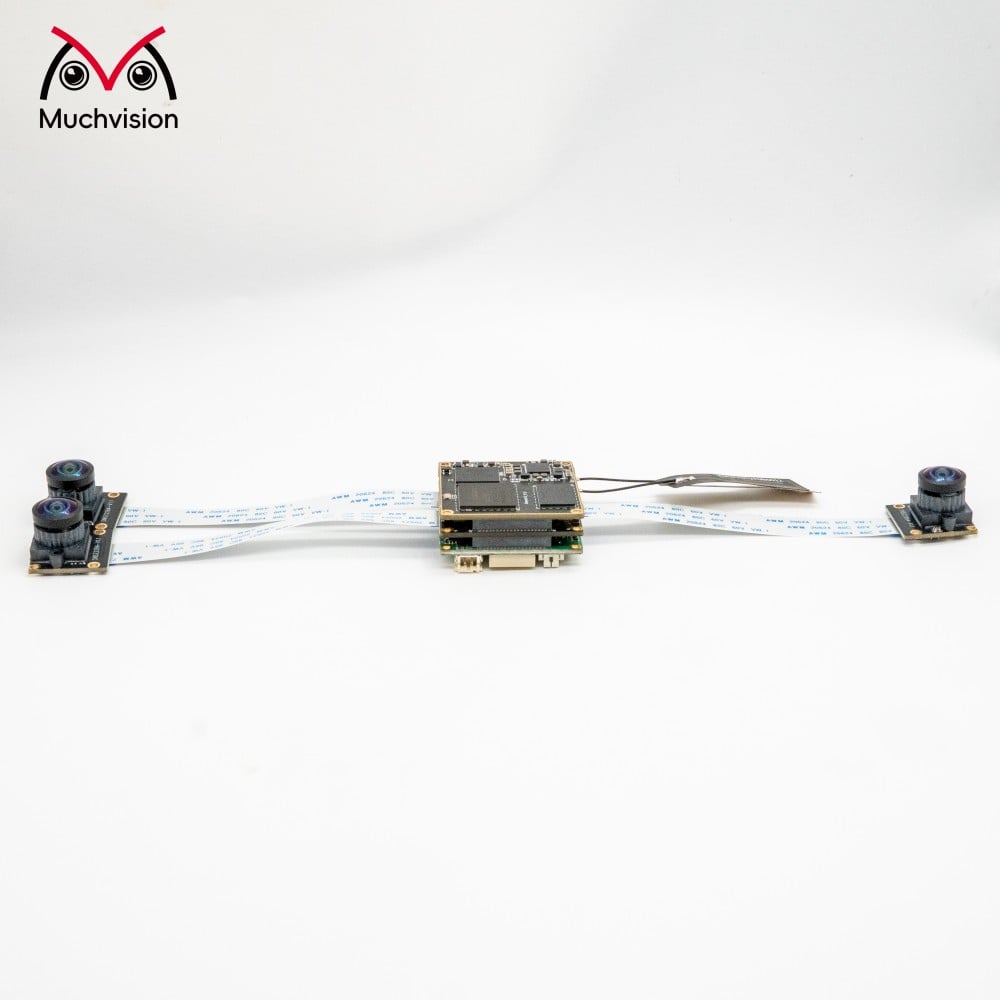
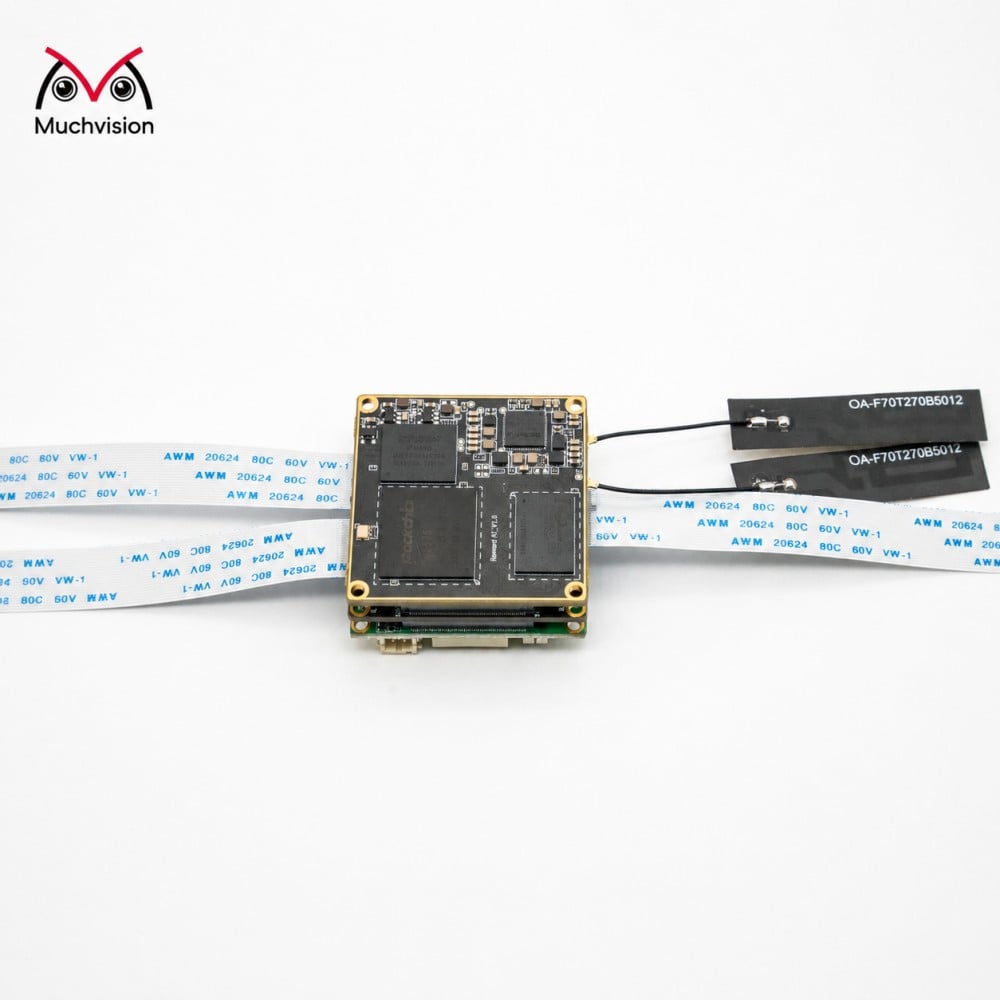
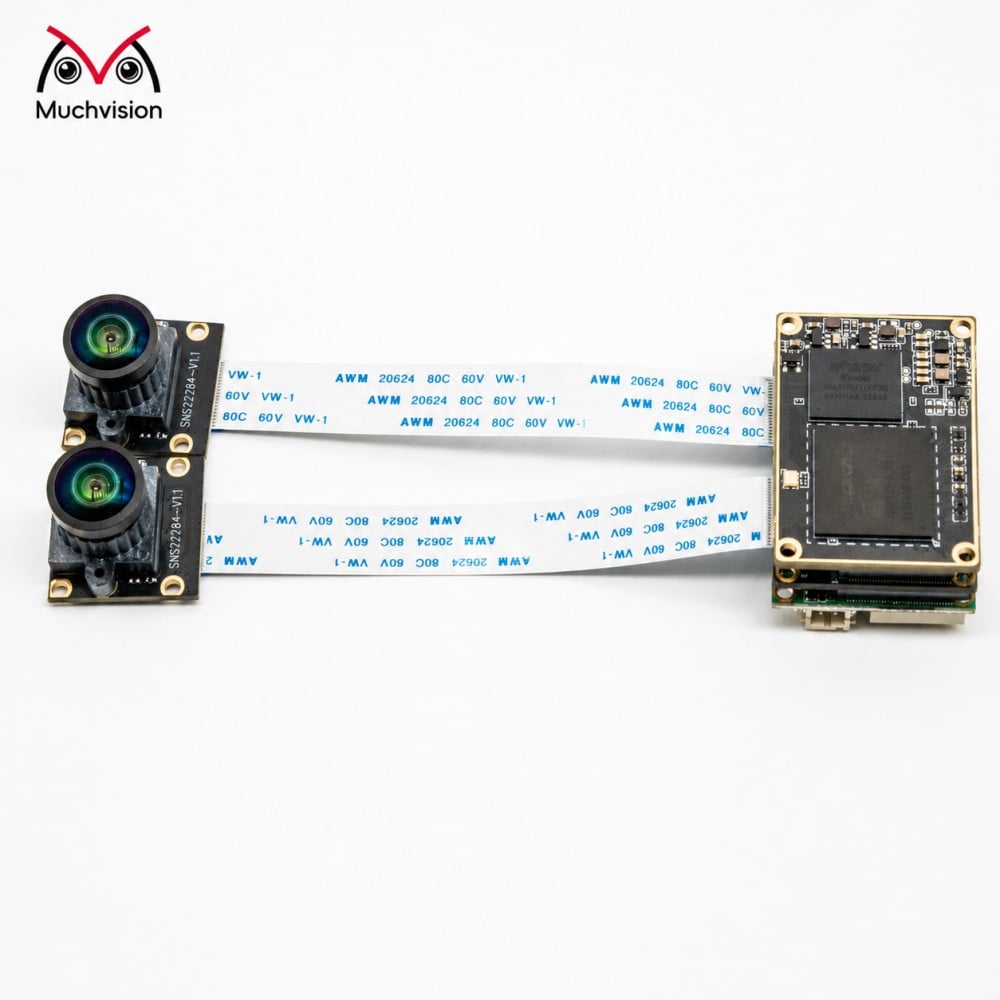
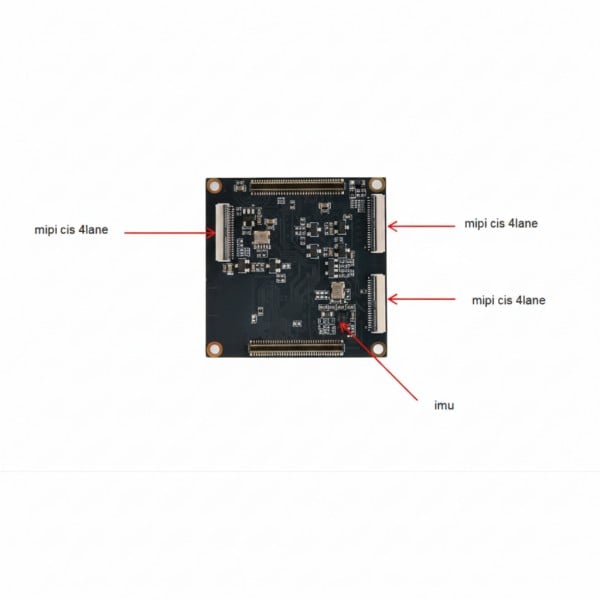
MV12-V1.0 – מוצר זה הוא פלטפורמה מחשוב רב-מודלית מסנכרנת עם ארבעה ערוצים חזותיים, המבוססת על מעבד Rockchip RK3576 בעל ביצועים גבוהים. היא כוללת יחידת מדידה אינרציאלית (IMU) מדויקת במיוחד וארבעה ממשקים עצמאיים למצלמות מסוג MIPI. באמצעות מנגנון שיגור סנכרון ברמת החומרה, היא מבטיחה יישור מרחב-זמני ברמת המיקרו-שניות בין התמונות החזותיות מרובה הערוצים לבין נתוני התנועה וההטיה.
באמצעות הארכיטקטורה ההטרוגנית שמונה הליבות של RK3576 והעוצמה החישובית שלה בתחום הבינה המלאכותית, המערכת תומכת לא רק בעיבוד מקבילי של מספר זרמי וידאו באיכות גבוהה, אלא גם מריצה בזמן אמת, בקצה הרשת, אלגוריתמים מורכבים של מיפוי SLAM, איתור VIO ומסקנות AI. בכך היא מספקת בסיס נתונים איתן להבחנה מדויקת בסביבות דינמיות.
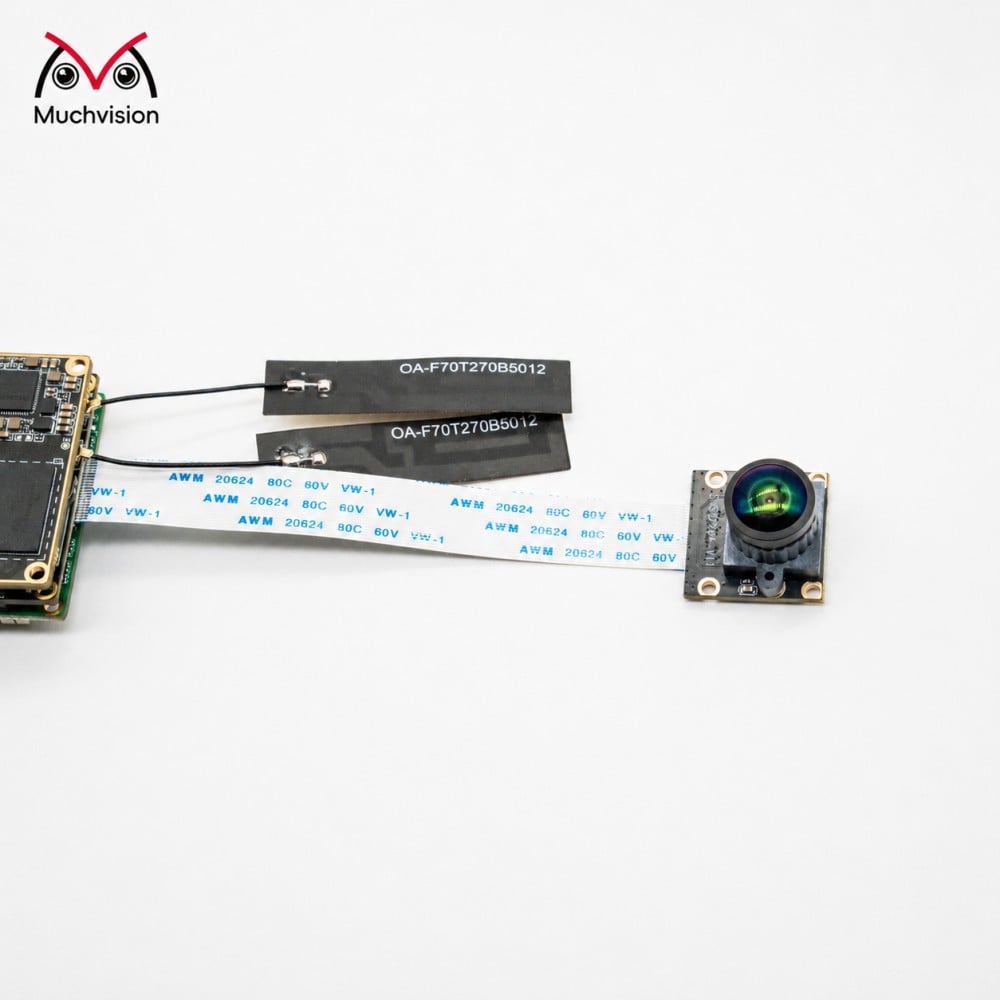
הפלטפורמה מציעה תאימות יוצאת דופן לחיישנים ויכולת התאמה למגוון תרחישים, ותומכת בבחירת גמישה של חיישנים עתידיים בעלי ביצועים גבוהים כדי לבנות פתרונות תפיסה מותאמים אישית. היא תואמת מגוון רחב של חיישנים למחשכים ולסנקר גלובלי, כולל ה-IMX662, ה-IMX464, ה-OV9281 וה-AR0234. בשילוב עם תיקון ששת הצירים של המיקום והכיוון שמספק ה-IMU המובנה, המערכת שומרת על יכולת מדויקת מאוד של איתור עצמי והבנת הסביבה גם בתנאים קיצוניים כגון סביבות שבהן אין זיהוי GPS או שינויים דרמטיים באור. בנוסף, הלוח הראשי שומר על ממשקים מורחבים רבים של SPI ו-I2C, עם תמיכה נativa למערכות מיקרופונים, רמקולים ומודולי ניהול טעינה של סוללות. העיצוב המשולב ביותר הזה מעניק להתקן את היכולת "לשמוע" ו"לדבר", מה שמגביה אותו מטרמינל תפיסה חזותית בודד לשליטה אינטליגנטית מסוגלת באינטראקציה קולית, משוב על מצב והפעלה ניידת, ומכאן שהיא מפחיתה באופן משמעותי את מורכבות תכנון המעגלים החיצוניים.
עם היתרונות המגוונים שלו של 'עוצמת חישוב גבוהה + מיזוג חיישנים מרובי-סוגים + סנכרון חומרתי + אינטראקציה עשירה', מוצר זה מעניק כוח לתחומים חדשניים כגון בינה מלאגית (Embodied AI), בדיקות תעשייתיות ונהיגה אוטונומית. ביישויות רובוטיות דמויות אנושיות, הוא משמש כיחידה עיקרית להבחנה, ומאפשרת הימנעות מהירה ממפריעים ברמת מילישניות והחזרה מדויקת בעת שידול עם מצלמות שוטף גלובלי, ובמקביל מגשימה אינטראקציה טבעית בין אדם למכונה באמצעות מודול הקול שלו. עבור בדיקות תעשייתיות בכל מזג אוויר, הוא משתמש בחיישנים ברמה של אור כוכבים כדי להבטיח בטיחות חזותית גם בפעולה לילית, ובמקביל מספק התראות על תופעות חריגות דרך הרמקול שלו. בתחומי הנהיגה האוטונומית ומהירויות נמוכות וכן כלי רכב לוגיסטיים, הוא מצליח להשיג תצוגת סביבה של 360° וניווט בדרגת דיוק גבוהה באמצעות מיזוג חזותי מרובה-מצלמות. אם מדובר במחקר ופיתוח או בהצבה מסחרית, פלטפורמה זו היא בחירה אידיאלית לפתרון אתגרי החזות המורכבים של מכונות והרחבת גבולות האינטראקציה.
תרחישי יישום
מוצרי טרמינלים עם יכולת חזותית בתחומים של פיננסים, מדיה, תשלום, קמעונאות, בקרה תעשייתית, חינוך, ממשל/איגודים ובריאות. מתאים לשימוש בתחומים כגון רובוטים דמויי אדם, קמעונאות חכמה, מצלמות פנורמיות, מחסנים ללא צוות, מיון ומסירה אינטליגנטיים, וציוד טיס אוטונומי לא מאויש.
 |
 |
 |
 |
 |
 |
 |
 |
 |
פרמטרים סטנדרטיים
| פרמטרים מרכזיים | |
| סי.פי.יו | מעבד שמונה ליבות 64-ביט (4×A72 + 4×A53), עם תדר שיא של 2.2 ג'יגה-הרץ |
| GPU | G52 MC3 @ 1 ג'יגה-הרץ, תומך ב-OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | יחידת עיבוד ניורוני (NPU) בעוצמת חישוב של 6 טרה פעולות לשנייה (TOPS), התומכת בפעולות INT4/INT8/INT16/FP16/BF16/TF32; מסוגלת לפעול בשיתוף פעולה דו-ליבתי או באופן עצמאי; תומכת בעיבוד רב-משימות ובעיבוד מקבילי במגוון תרחישים |
| Isp | מוכן עם מעבד תמונה מובנה (ISP) של 16 מגה-פיקסלים, התומך בהפחת רעש בתנאי תאורה נמוכה, חיישן RGB-IR, וטווח דינמי גבוה עד 120 דציבל (HDR). ISP המבוסס על בינה מלאכותית משפר את איכות התמונה ומצמצם את הרעש. |
| זיכרון | LPDDR4/LPDDR4x/LPDDR5 (4 ג'יגה-בייט/8 ג'יגה-בייט/16 ג'יגה-בייט – לפי בחירה) |
| אחסון מובנה | eMMC (16 ג'יגה-בייט/32 ג'יגה-בייט/64 ג'יגה-בייט/128 ג'יגה-בייט/256 ג'יגה-בייט – לפי בחירה) |
| קידוד וידאו | פענוח וידאו: 8K@30FPS/4K@120FPS (H.265/HEVC, VP9, AVS2, AV1); 4K@60FPS (H.264/AVC) פענוח וידאו: 4K@60FPS (H.265/HEVC, H.264/AVC) פענוח תמונות: 4K@60FPS MJPG |
| הספק | DC 5V |
| מערכת הפעלה | תומך בליבה RTLinux עם ביצועים מצוינים בזמן אמת, ושימוש נרחב ביישומים תעשייתיים. תומך במערכת ההפעלה לינוקס וב-Buildroot כדי לספק סביבת מערכת מאובטחת ויציבה לפיתוח מוצר וליצור. המוצר מציג יכולות תעשייתיות חדשות כגון רשת בזמן אמת, Flexbus, עקירת משאבים חומרתיים ו-DSMC, הממלאות דרישות יישום תעשייתיות מגוונות. |
| מידות | 41 מ"מ × 41 מ"מ × 20 מ"מ |
| תומך במצלמה | ממשק MIPI תלת-ערוצי דו-נתיבי: OV9281, IMX662, AR0234, IM464 וכו', עם תמיכה בהתאמה אישית |
| גירוסקופ IMU | 4 גירוסקופים מסדרת TDK ICM42670 |
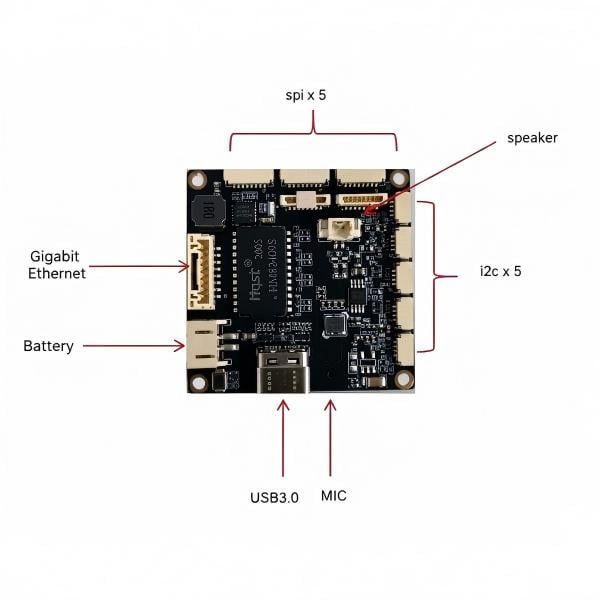
| אתרנט | פורט Ethernet בגודל ג'יגביט אחד (מחובר דרך שקע Wafer 8P-1.25 מ"מ) |
| Wi-Fi / PDA | מצויד במודול Wi-Fi פנימי התומך ב-Wi-Fi 6 דו-פסי (802.11a/b/g/n/ac/ax) בתדרים 2.4 ג"הץ ו-5 ג"הץ, וכן בתמיכה ב-Bluetooth. |
| USB | פתח חיצוני אחד מסוג Type-C USB 3.0 (תומך ב-ADB) |
| אנטנה | מסלול 1 |
| לחיצה על כפתור | כפתור 1 |
| ממשק SPI | 5PCS |
| Інтерфейс I2C | 5PCS |
| מיקרופון | 1 מיקרופון דיגיטלי |
| SPK | צפצוף מסלול 1 (2 פינים עם ריווח של 1.25 מ"מ בין הטרמינלים) |
גודל לוח האם
 |
 |
 |
תיאור הממשק
 |
 |
הזהרות
תכונות סביבתיות
טמפרטורה
טמפרטורת הפעלה: 0°–+40° צלזיוס
טמפרטורת אחסון: 20−°–+70° צלזיוס
לחות באחסון
לחות أثناء הפעלה: 10%–90% (ללא הקשה)
לחות באחסון: 5%–95% (ללא הקשה)
גובה
תפעול: 10,000 רגל (מקסימום)
אחסון: 20,000 רגל (מקסימום)
טמפרטורה גבוהה ואחסון
שיטה ותנאי הבדיקה – עיינו בתיאור של הסטנדרט GB2423.2, בדיקות Bd ו-Bb
טמפרטורה נמוכה ואחסון
שיטה ותנאי הבדיקה – עיינו בתיאור של הסטנדרט GB2423.1, בדיקות Ad ו-Ab
בדיקת לחות וטמפרטורה
שיטה ותנאי הבדיקה – עיינו בתיאור של הסטנדרט GB2423.3, בדיקה Ca, ושל הסטנדרט GB2423.22, בדיקה Nb
הנחיות להרכבה ושימוש
במהלך ההרכבה והשימוש, יש לשים לב ולבדוק את הנקודות הבאות (ולא רק אותן):



