






Scheda robotica multimodale | Interfaccia uomo-macchina visiva e vocale — MV12
- Panoramica
- Prodotti consigliati
- Le schede PCBA e i componenti elettronici sono altamente sensibili alle scariche elettrostatiche (ESD). Gli operatori devono indossare braccialetti antistatici (ESD) o guanti prima di maneggiare le schede o procedere al montaggio, per garantire un'adeguata dissipazione delle cariche elettrostatiche.
- Durante le operazioni di installazione e fissaggio, evitare deformazioni della scheda madre causate da forze esercitate durante il fissaggio;
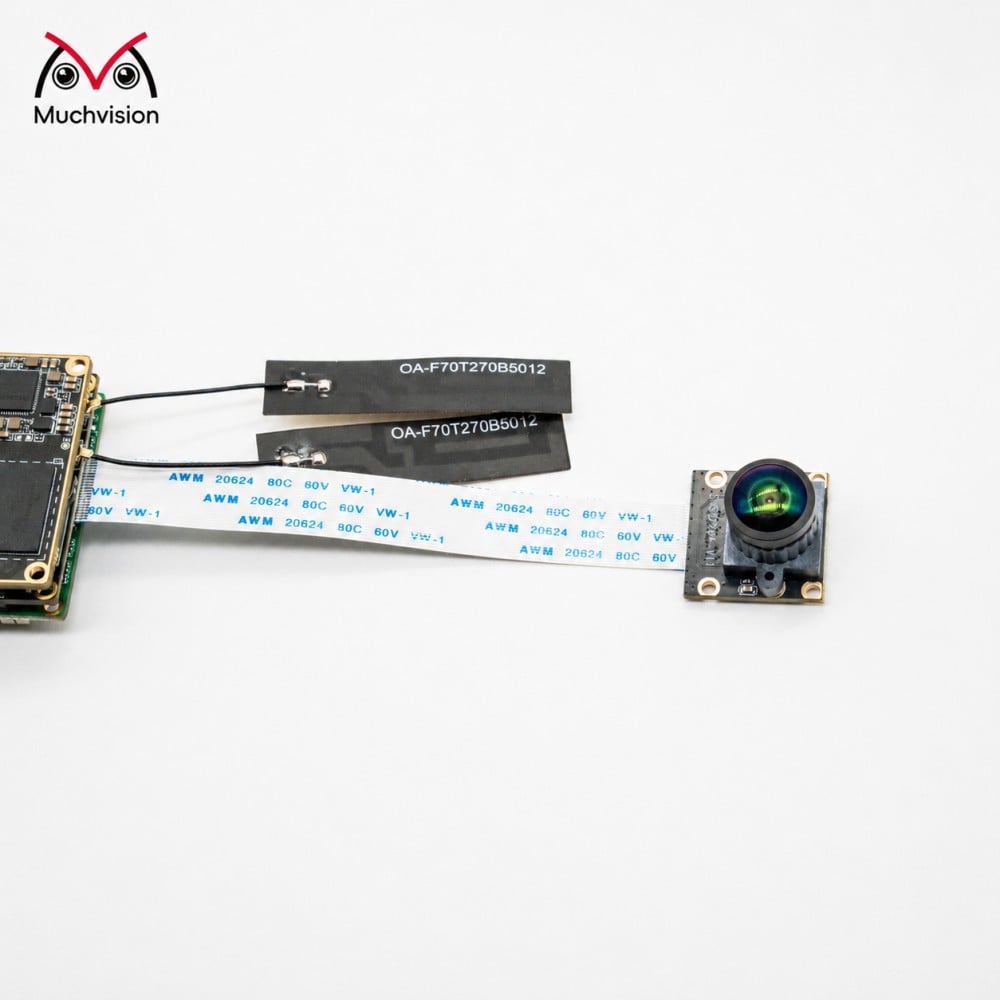
- Assicurarsi che l'interfaccia MIPI sia correttamente allineata durante l'installazione della fotocamera. Verificare la direzione del Pin 1;
- Assemblaggio del connettore B2B: seguire la sequenza "innestare prima, avvitare poi". Allineare e premere i connettori per innestarli completamente prima di serrare le quattro viti agli angoli. Ciò garantisce che il connettore sopporti le sollecitazioni da vibrazione, mentre le viti supportano principalmente il peso.;
- Durante l'installazione dei dispositivi periferici (USB, IO, ETC), prestare attenzione ai livelli di ingresso/uscita delle periferiche e ai problemi relativi alla corrente erogata;
- Durante l'installazione della porta seriale, verificare se i dispositivi RS232 e TTL sono collegati direttamente, se i collegamenti TX e RX sono corretti e se i livelli logici sono compatibili;
- Verificare se l'alimentazione in ingresso è collegata all'interfaccia di ingresso dell'alimentazione e se la tensione e la corrente di ingresso soddisfano i requisiti previsti in base al totale dei dispositivi periferici.
Descrizione
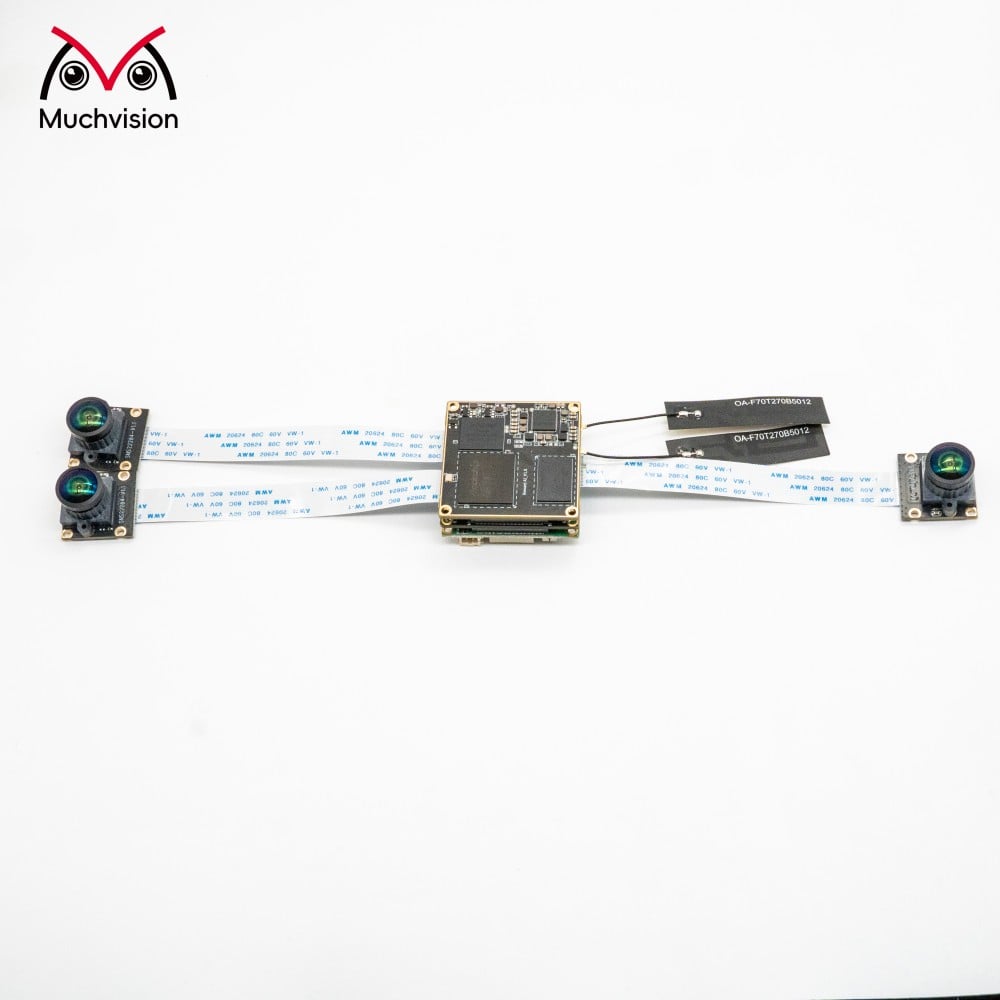
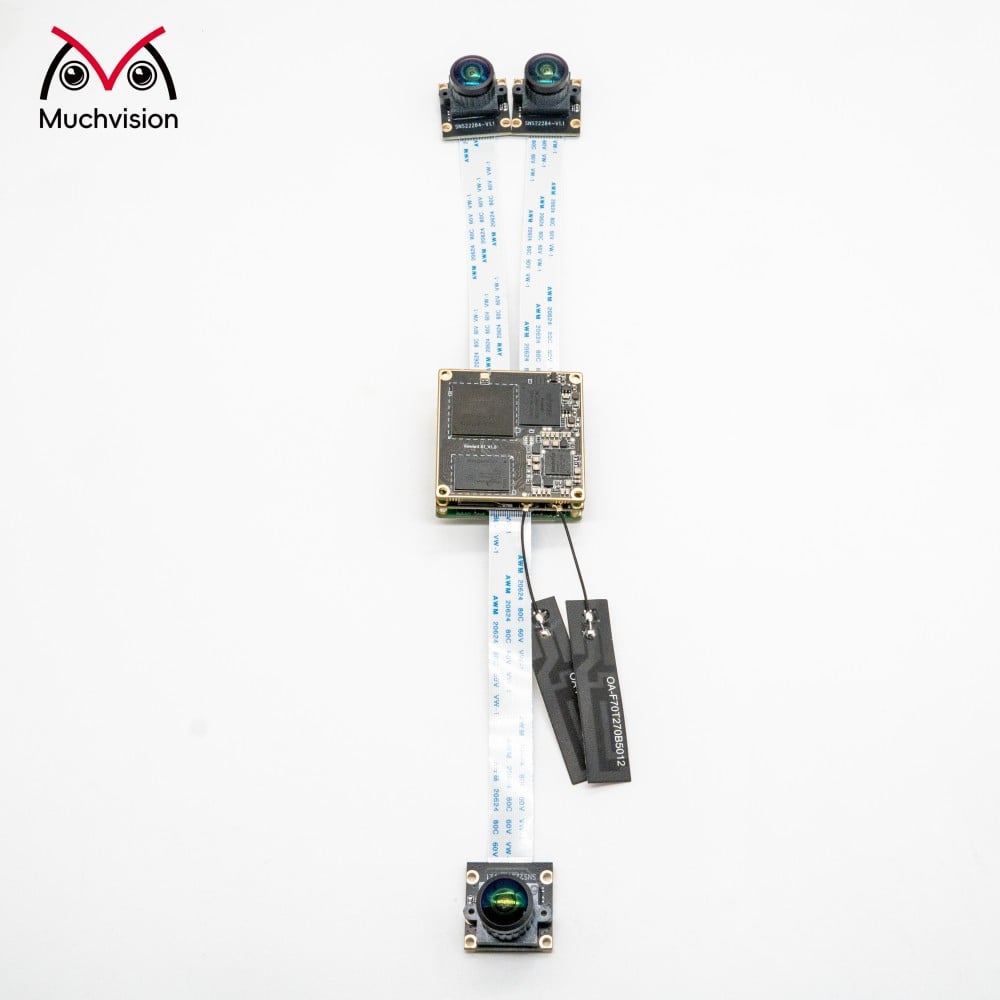
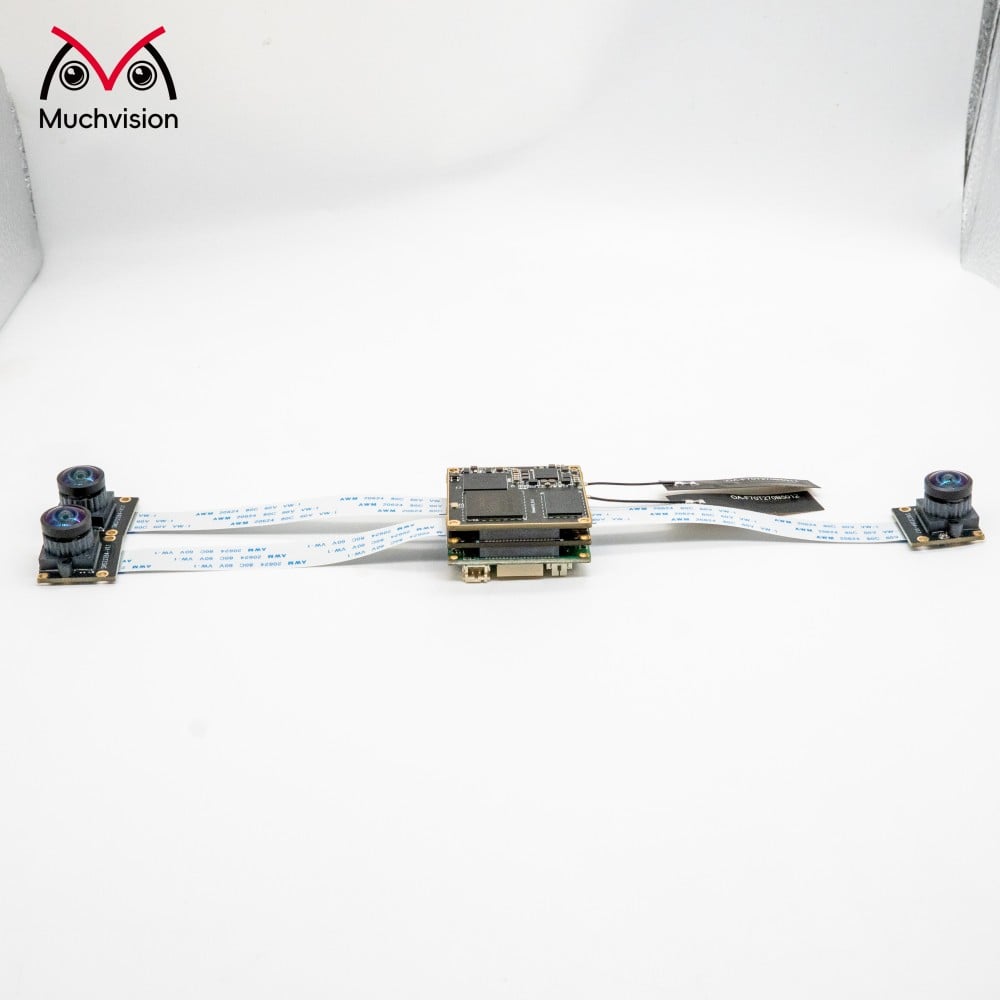
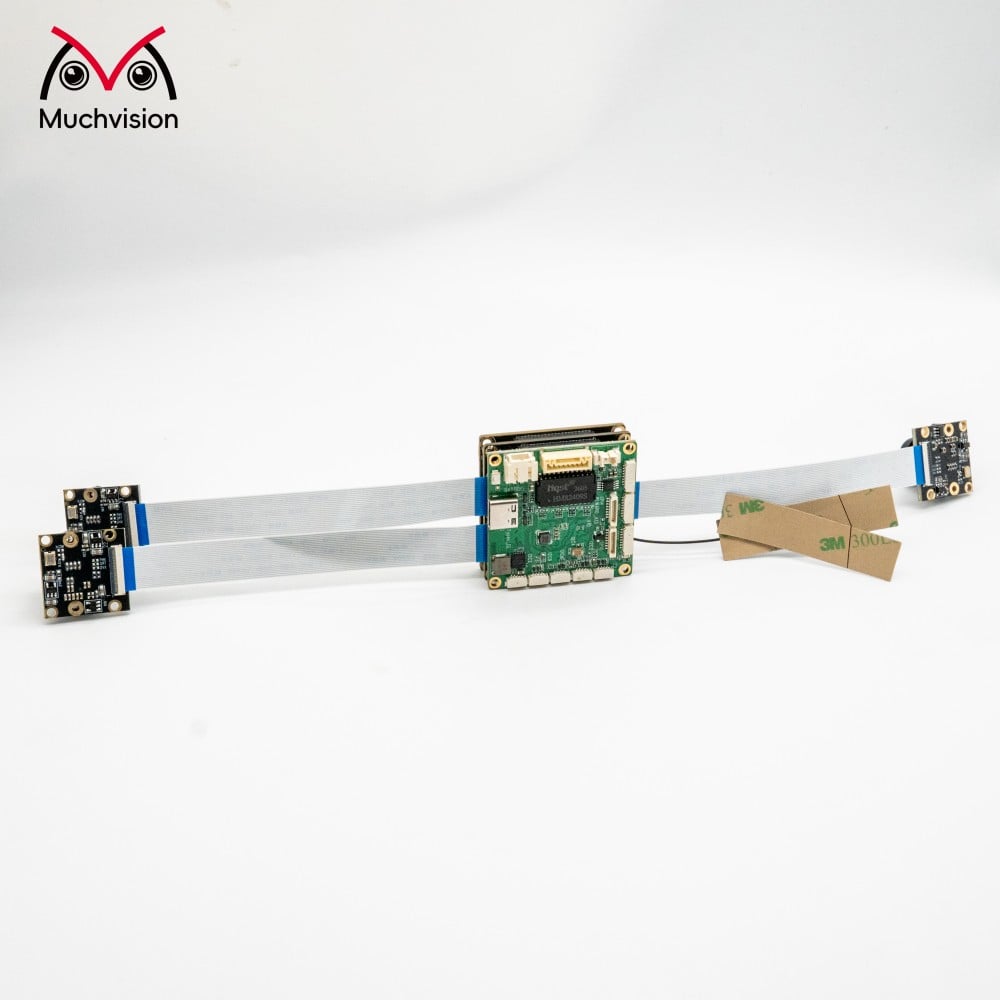
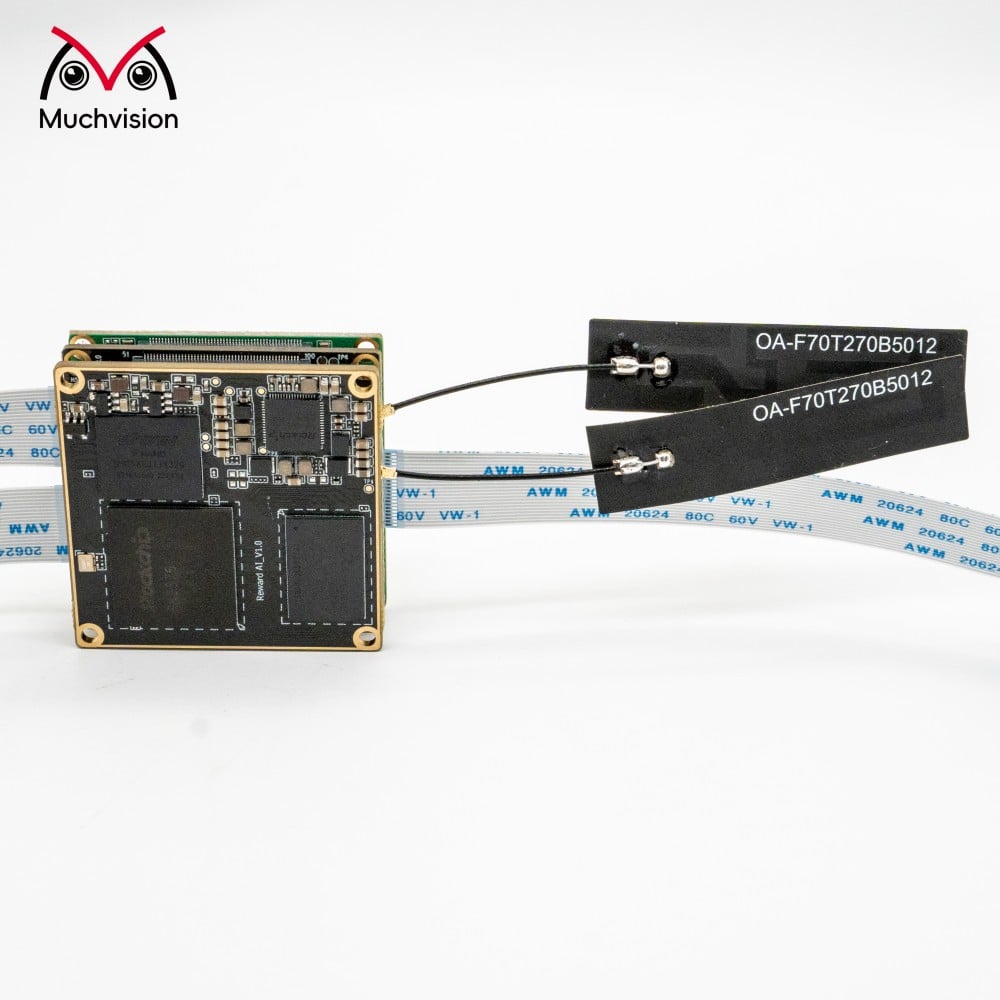
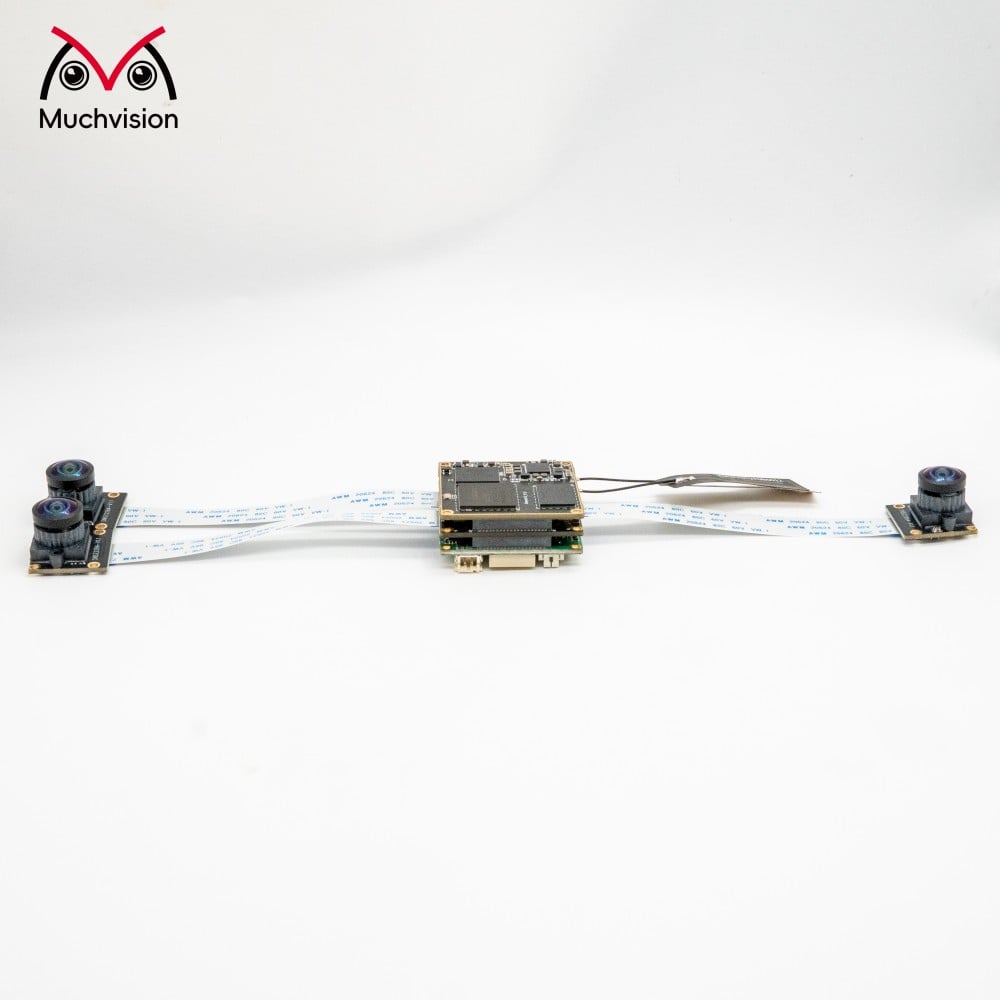
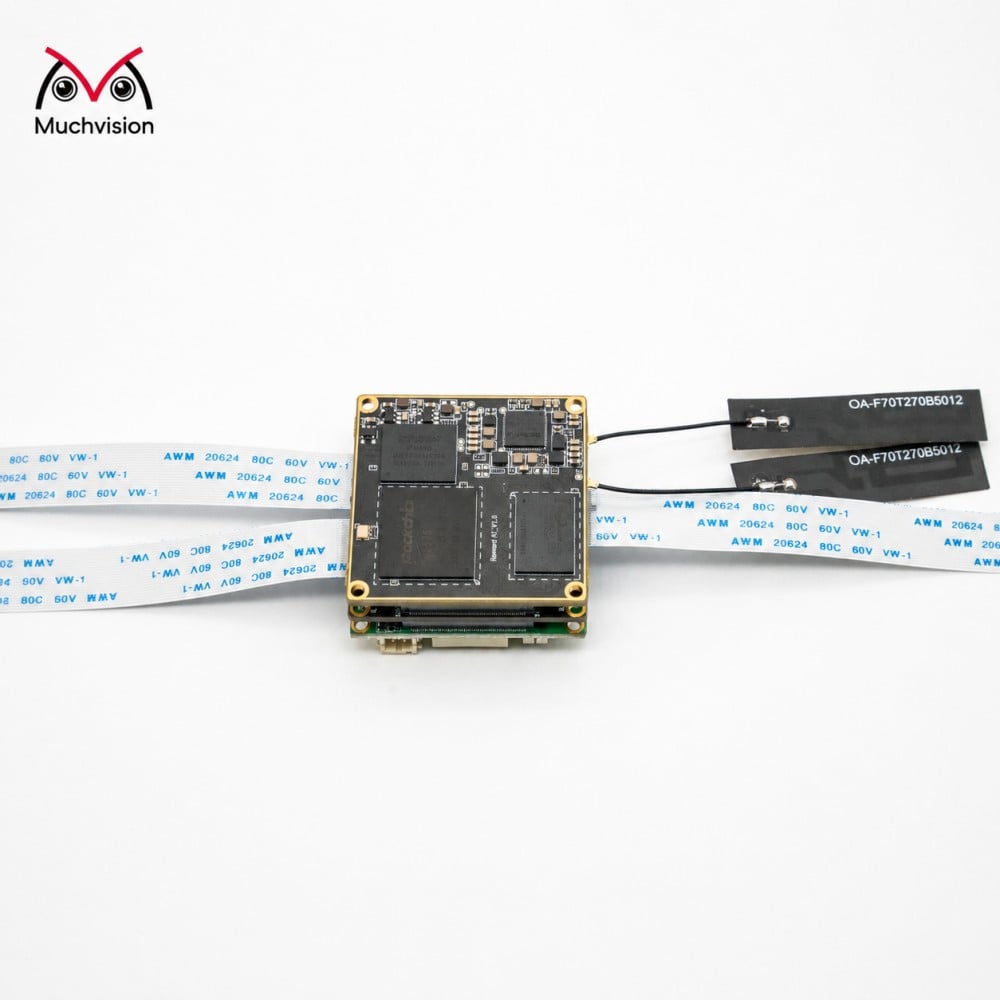
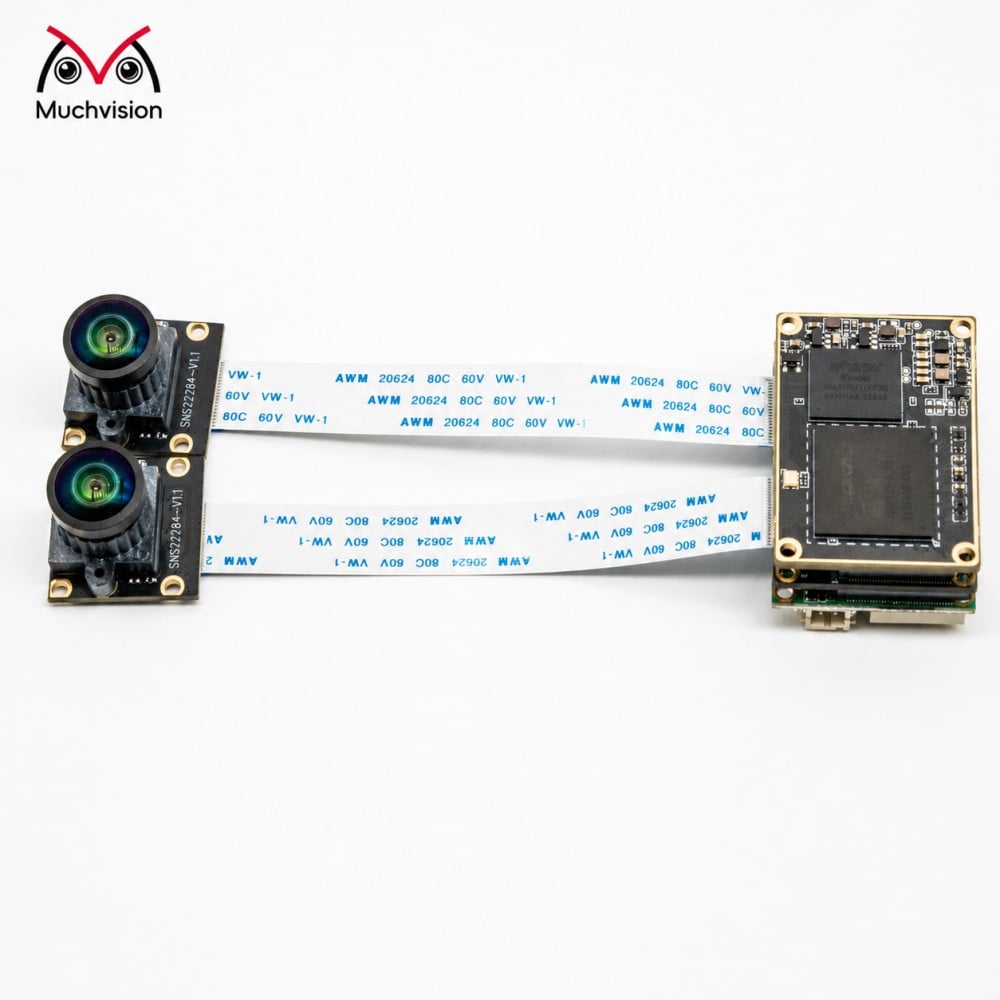
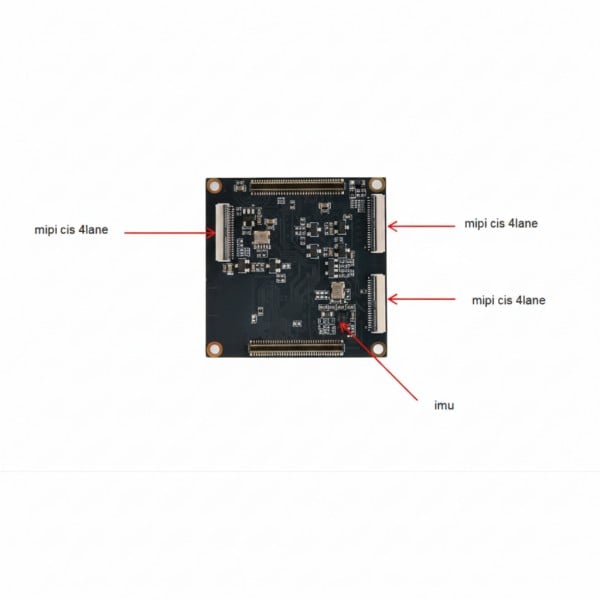
MV12-V1.0 Questo prodotto è una piattaforma di calcolo visiva e multimodale sincronizzata a quattro canali, basata sul potente processore Rockchip RK3576. Integra un’unità di misura inerziale (IMU) ad alta precisione con quattro interfacce indipendenti per telecamere MIPI. Grazie a un meccanismo hardware di attivazione sincrona, garantisce un’allineamento spazio-temporale a livello di microsecondi tra le immagini visive multicanale e i dati di movimento e assetto.
Sfruttando l’architettura eterogenea a 8 core e la potenza di calcolo AI del RK3576, il sistema supporta non solo l’elaborazione parallela di più flussi video HD, ma esegue anche in tempo reale, direttamente sul dispositivo (edge), complessi algoritmi di mappatura SLAM, localizzazione VIO e inferenza AI. Ciò fornisce una solida base dati per una percezione precisa in ambienti dinamici.
La piattaforma offre un'eccezionale compatibilità con i sensori e un'elevata adattabilità a diversi scenari, supportando la selezione flessibile di sensori mainstream ad alte prestazioni per costruire soluzioni personalizzate di percezione. È compatibile con una varietà di sensori a bassa illuminazione e con otturatore globale, tra cui l'IMX662, l'IMX464, l'OV9281 e l'AR0234. In combinazione con la compensazione dell'assetto a 6 assi fornita dall'IMU integrato, il sistema mantiene elevate capacità di autolocalizzazione e di percezione ambientale anche in condizioni estreme, come ambienti privi di segnale GPS o con bruschi cambiamenti di illuminazione. Inoltre, la scheda principale prevede numerose interfacce di espansione SPI e I2C, con supporto nativo per array di microfoni, altoparlanti e moduli di gestione della ricarica della batteria. Questa progettazione altamente integrata conferisce al dispositivo la capacità di "sentire" e "parlare", trasformandolo da un semplice terminale di percezione visiva in un dispositivo intelligente in grado di interagire tramite voce, fornire feedback sullo stato e operare in mobilità, semplificando notevolmente la complessità della progettazione dei circuiti periferici.
Grazie ai vantaggi complessivi di «elevata potenza di calcolo + fusione multi-sensore + sincronizzazione hardware + interazione ricca», questo prodotto abilita ampiamente ambiti all'avanguardia come l'Intelligenza Artificiale Incarnata (Embodied AI), l'ispezione industriale e la guida autonoma. Nelle applicazioni relative ai robot umanoidi, funge da unità centrale di percezione, consentendo l'evitamento di ostacoli a livello di millisecondi e la presa precisa quando abbinato a telecamere con otturatore globale, mentre garantisce un'interazione uomo-macchina naturale grazie al suo modulo vocale. Per l'ispezione industriale in condizioni di qualsiasi tempo, utilizza sensori di livello «starlight» per assicurare la sicurezza visiva durante le operazioni notturne, fornendo contemporaneamente avvisi di anomalie tramite l'altoparlante. Nel campo della guida autonoma a bassa velocità e dei veicoli logistici, raggiunge una visione a 360° e una navigazione ad alta precisione mediante la fusione visiva multi-camera. Che si tratti di ricerca e sviluppo o di distribuzione commerciale, questa piattaforma rappresenta una scelta ideale per risolvere complesse sfide di visione artificiale ed espandere i confini dell'interazione.
Scenari applicativi
Prodotti terminali abilitati alla visione per i settori finanziario, media, pagamento, retail, controllo industriale, istruzione, pubblica amministrazione/aziendale e sanità. È adatto a campi applicativi quali robot umanoidi, retail intelligente, telecamere panoramiche, magazzini senza personale, ordinamento e consegna intelligenti ed equipaggiamenti UAV automatizzati.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Parametri Standard
| Parametri chiave | |
| CPU | Processore octa-core a 64 bit (4×A72 + 4×A53), con frequenza massima di clock di 2,2 GHz |
| Scheda grafica | G52 MC3 @ 1 GHz, supporto OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | unità di elaborazione neurale (NPU) con potenza computazionale di 6 TOPS, che supporta operazioni INT4/INT8/INT16/FP16/BF16/TF32; in grado di operare in collaborazione a doppio core o in modo indipendente; supporta l’elaborazione multitasking e parallela in vari scenari |
| Isp | Dotato di un ISP integrato da 16 megapixel che supporta la riduzione del rumore in condizioni di scarsa illuminazione, un sensore RGB-IR e un HDR fino a 120 dB. L’ISP basato sull’intelligenza artificiale migliora la qualità dell’immagine riducendo il rumore. |
| memoria | LPDDR4/LPDDR4x/LPDDR5 (opzionali: 4 GB/8 GB/16 GB) |
| Memoria interna | eMMC (opzionali: 16 GB/32 GB/64 GB/128 GB/256 GB) |
| Codifica video | Decodifica video: 8K@30fps/4K@120fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60fps (H.264/AVC) Decodifica video: 4K@60fps (H.265/HEVC, H.264/AVC) Decodifica immagini: MJPG a 4K@60fps |
| potenza | DC 5V |
| SO | Supporta il kernel RTLinux con eccellenti prestazioni in tempo reale, ampiamente utilizzato nelle applicazioni industriali. Supporta il sistema operativo Linux e Buildroot per fornire un ambiente di sistema sicuro e stabile per lo sviluppo e la produzione di prodotti. Offre nuove funzionalità industriali, quali la rete in tempo reale, Flexbus, l'isolamento delle risorse hardware e DSMC, soddisfacendo le diverse esigenze delle applicazioni industriali. |
| dimensione | 41 mm × 41 mm × 20 mm |
| Supporto fotocamera | interfaccia MIPI a 3 canali e 2 lane: OV9281, IMX662, AR0234, IM464, ecc., con possibilità di personalizzazione |
| Giroscopio IMU | 4 giroscopi della serie TDK ICM42670 |
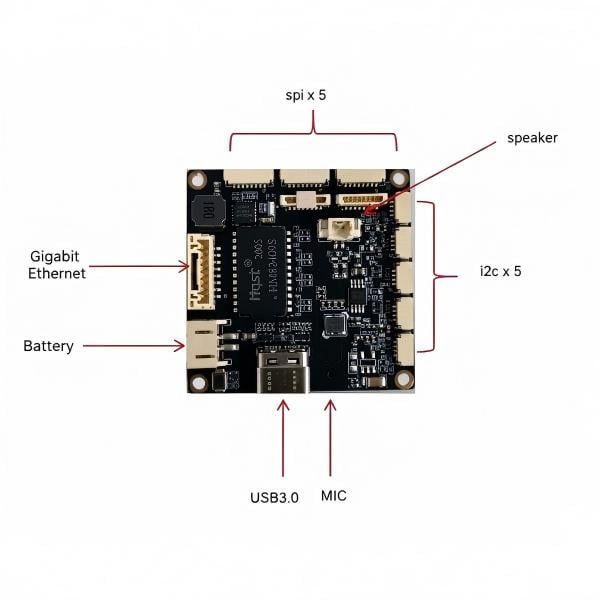
| Ethernet | 1 porta Ethernet Gigabit (connessa tramite un connettore Wafer da 8 poli con passo di 1,25 mm) |
| WiFi/PDA | Dotato di un modulo WiFi integrato che supporta WiFi 6 dual-band (802.11a/b/g/n/ac/ax) a 2,4 GHz e 5 GHz, nonché il supporto Bluetooth. |
| USB | 1 porta USB 3.0 esterna di tipo C (supporta ADB) |
| antenna | Percorso 1 |
| pulsante | Pulsante 1 |
| Interfaccia SPI | 5pezzi |
| Interfaccia I2C | 5pezzi |
| Microfono | 1 microfono digitale |
| SPK | Clacson del Percorso 1 (2 poli con distanza tra i terminali di 1,25 mm) |
Dimensioni della scheda madre
 |
 |
 |
Descrizione dell'interfaccia
 |
 |
Precauzioni
Caratteristiche ambientali
Temperatura
Funzionamento: da 0 ℃ a +40 ℃
Conservazione: da -20 ℃ a +70 ℃
Umidità di conservazione
Funzionamento: 10%–90% (non condensante)
Conservazione: 5%–95% (non condensante)
Altitudine
Funzionamento: fino a 10.000 ft
Conservazione: fino a 20.000 ft
Alta temperatura e conservazione
Metodo e condizioni di prova: fare riferimento alla descrizione della norma GB2423.2 «Prova Bd e Bb»
Bassa temperatura e stoccaggio
Metodo di prova e condizioni: fare riferimento alla descrizione della norma GB2423.1 "Prova Ad e Ab"
Prova di umidità e temperatura
Metodo di prova e condizioni: fare riferimento alla descrizione delle norme GB2423.3 "Prova Ca" e GB2423.22 "Prova Nb"
Precauzioni per il montaggio e l'utilizzo
Durante il montaggio e l'utilizzo, prestare attenzione e verificare i seguenti punti critici (non limitatamente a questi):



