






- ຂໍ້ມູນທົ່ວໄປ
- ຜະລິດຕະພັນທີ່ແນະນຳ
- PCBA ແລະ ສ່ວນປະກອບເອເລັກໂຕຣນິກແມ່ນມີຄວາມອ່ອນໄຫວຕໍ່ຄວາມຮ້ອນທີ່ເກີດຈາກຄວາມຊົ້ນ (ESD) ພິເສດ. ຜູ້ປະຕິບັດງານຈຳເປັນຕ້ອງສວມສາຍຮັກສາຄວາມຊົ້ນ (ESD wrist straps) ຫຼື ເຄືອບມືກ່ອນຈະຈັດການກັບບ່ອດ ຫຼື ການຕິດຕັ້ງເພື່ອຮັບປະກັນວ່າຄວາມຊົ້ນຈະຖືກຂັບໄວ້ຢ່າງຖືກຕ້ອງ;
- ໃນຂະນະທີ່ຕິດຕັ້ງ ແລະ ຢືນຢືນ ກະລຸນາຫຼີກເວີ່ນການເກີດການເບື່ອງຂອງບ໋ອດຫຼັກອັນເນື່ອງມາຈາກການຢືນຢືນ;
- ຮັບປະກັນວ່າການຈັດເທິງຂອງສ່ວນຕໍ່ MIPI ແມ່ນຖືກຕ້ອງໃນຂະນະທີ່ຕິດຕັ້ງກ້ອງ. ຢືນຢັນທິດທາງຂອງ Pin 1;
- ການຕິດຕັ້ງຂອງຂະໜານ B2B: ຕາມລຳດັບ "ເຊື່ອມຕໍ່ກ່ອນ, ສັບຕໍ່ມາທີ່ຫຼັງ". ຈັດເທິງ ແລະ ກົດຂະໜານເພື່ອເຊື່ອມຕໍ່ຢ່າງເຕັມທີ່ກ່ອນຈະຂັບສະກູ້ວທັງສີ່ມຸມ. ສິ່ງນີ້ຈະຮັບປະກັນວ່າຂະໜານຈະສາມາດຮັບມືກັບຄວາມເຄື່ອນໄຫວ, ໃນຂະນະທີ່ສະກູ້ວຈະເຮັດໜ້າທີ່ສຳຄັນໃນການຮັບນ້ຳໜັກ;
- ໃນເວລາຕິດຕັ້ງອຸປະກອນເພີ່ມເຕີມ (USB, IO, ETC), ກະລຸນາສັງເກດລະດັບ IO ແລະ ບັນຫາການສົ່ງອອກປະຈຸບັນຂອງອຸປະກອນເພີ່ມເຕີມ;
- ເມື່ອຕິດຕັ້ງໂປຣແທກຊີລຽນ ຕ້ອງສັງເກດວ່າອຸປະກອນ RS232 ແລະ TTL ແມ່ນເຊື່ອມຕໍ່ໂດຍກົງຫຼືບໍ່, ວິທີການເຊື່ອມຕໍ່ TX ແລະ RX ແມ່ນຖືກຕ້ອງຫຼືບໍ່, ແລະ ລະດັບສັນຍານ (level) ແມ່ນຖືກຕ້ອງຫຼືບໍ່;
- ວ່າໄຟຟ້າທີ່ໃສ່ເຂົ້າໄປນັ້ນເຊື່ອມຕໍ່ກັບຂ້າງເຂົ້າໄຟຟ້າຫຼືບໍ່, ແລະ ຄ່າຄວາມດັນ, ຄ່າປະຈຸລີ (current) ແລະອື່ນໆ ຂອງໄຟຟ້າທີ່ໃສ່ເຂົ້າໄປ ສອດຄ່ອງກັບຄວາມຕ້ອງການຕາມອຸປະກອນຕໍ່ພົວພັນທັງໝົດຫຼືບໍ່.
ຄຳອະທິບາຍ
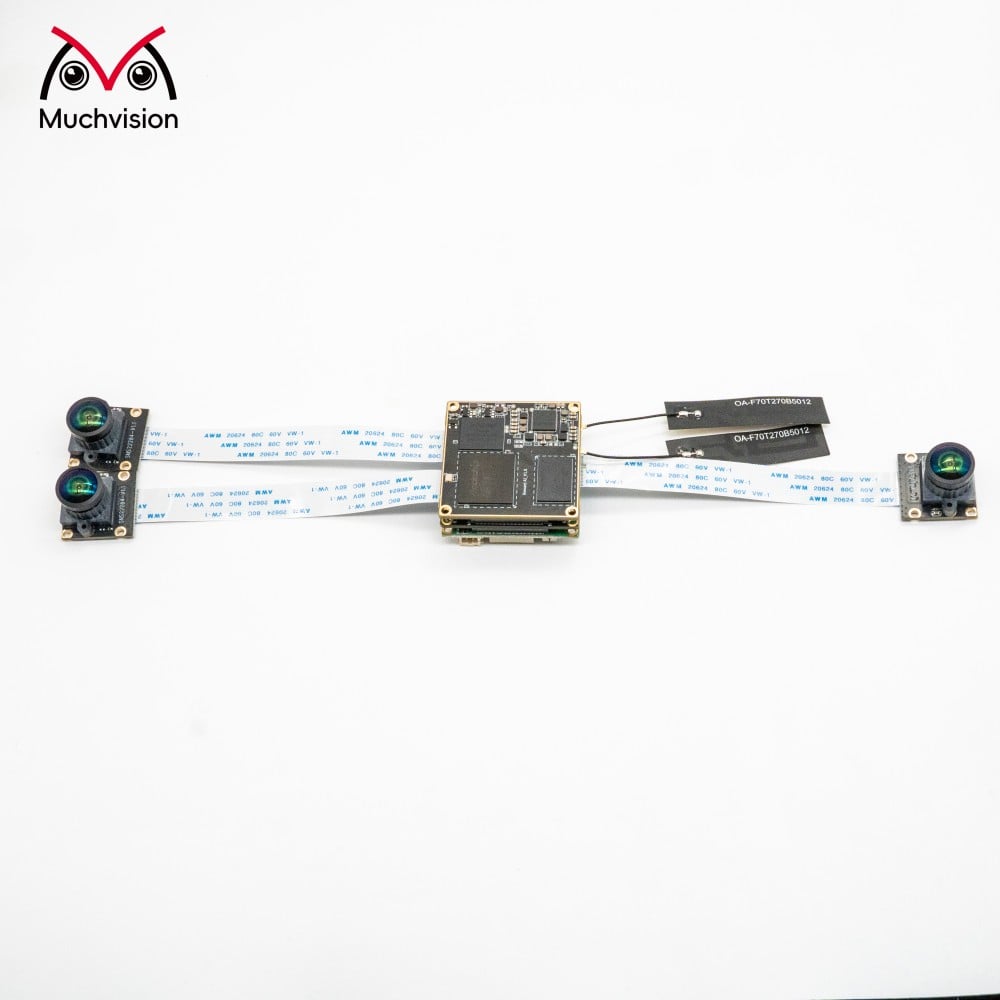
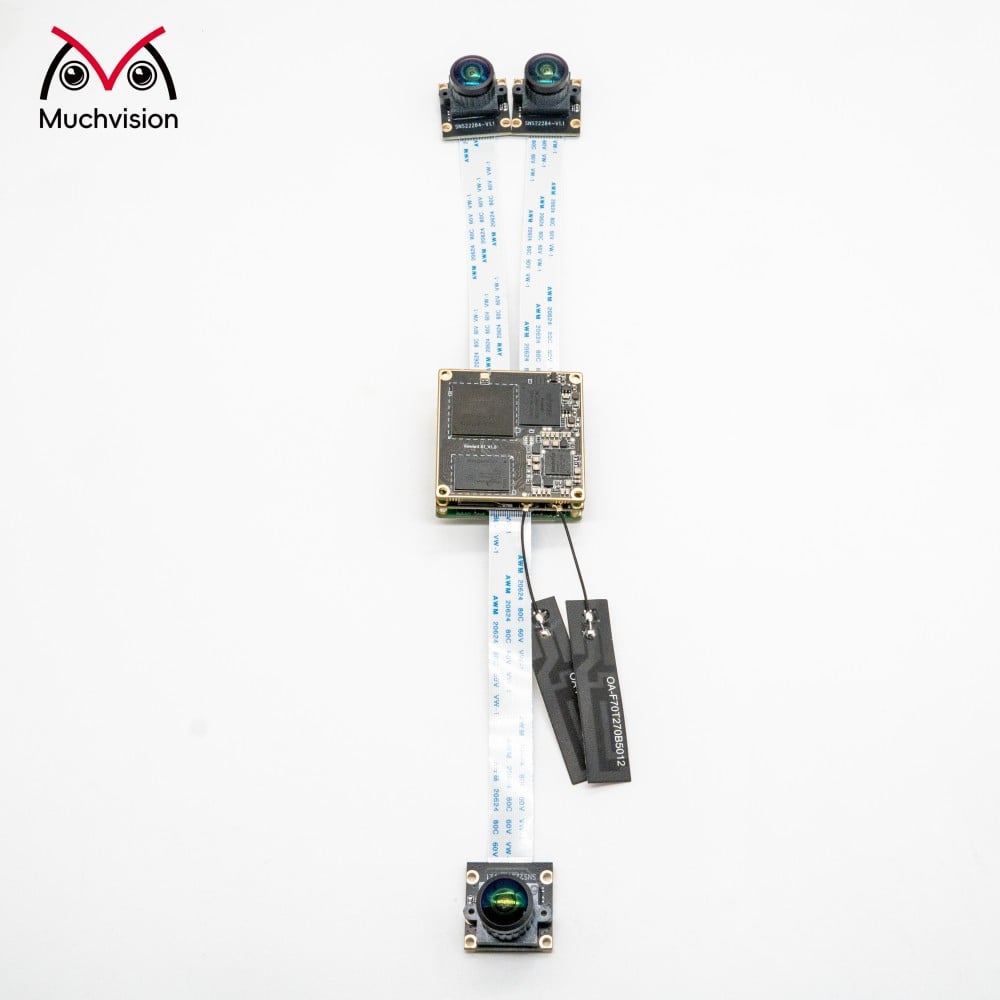
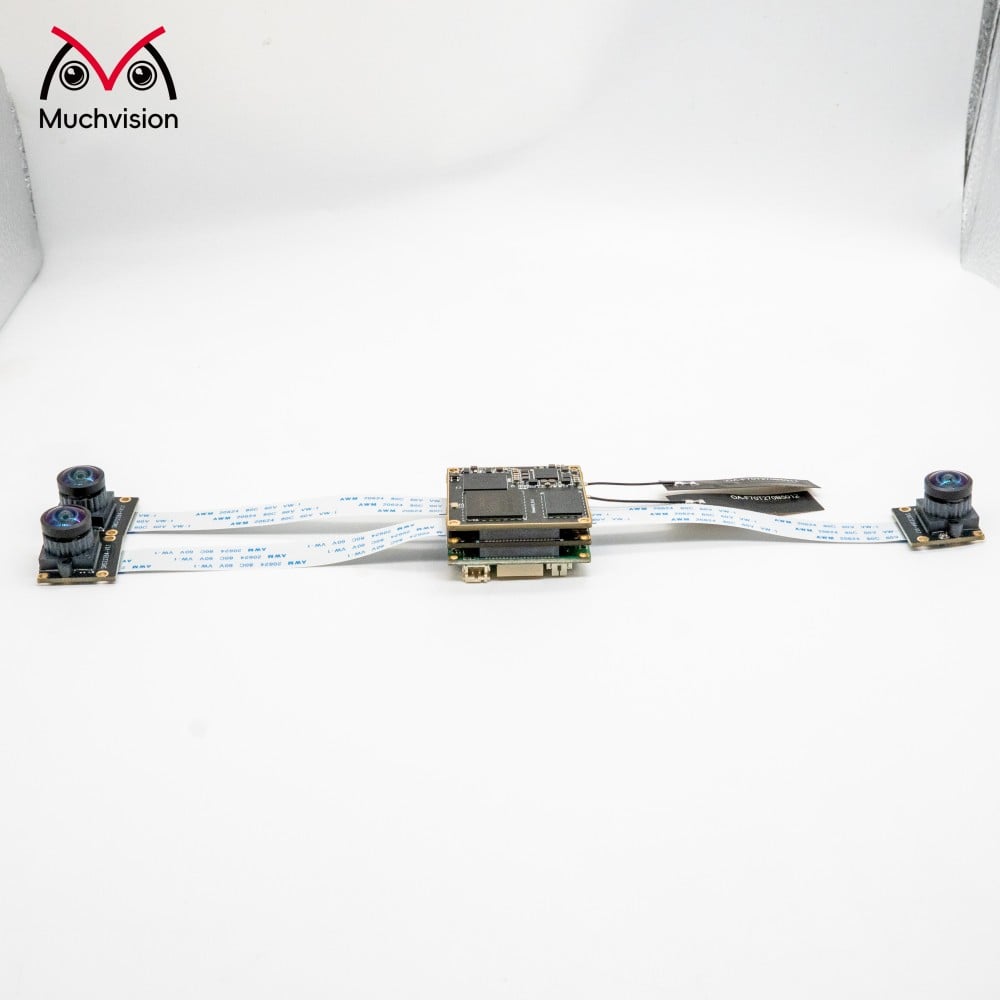
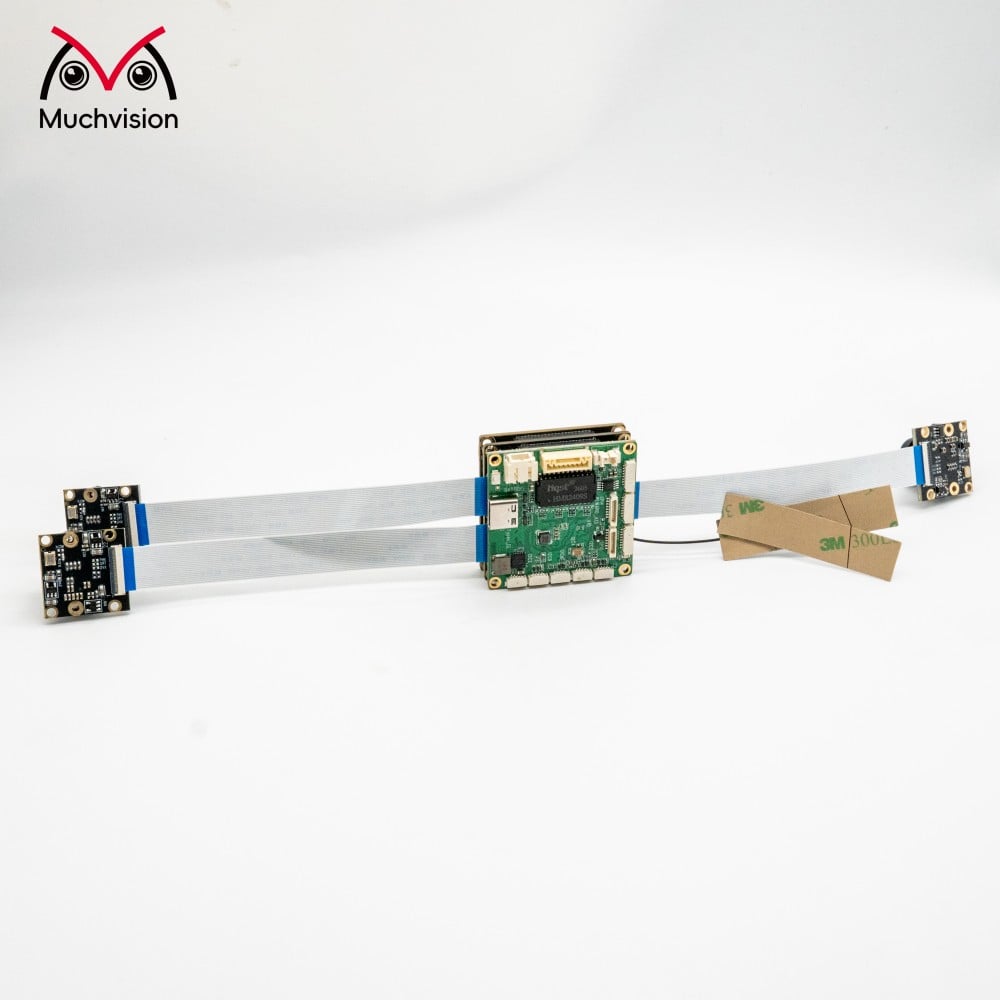
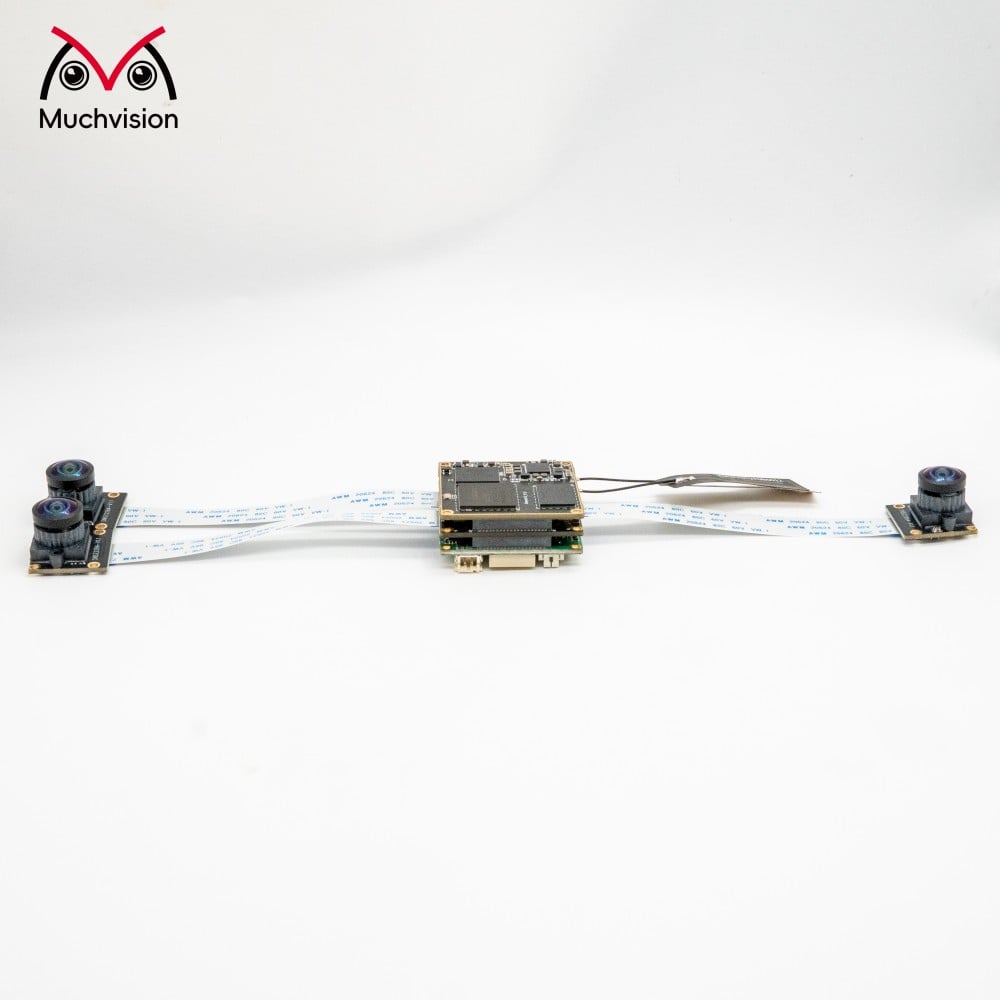
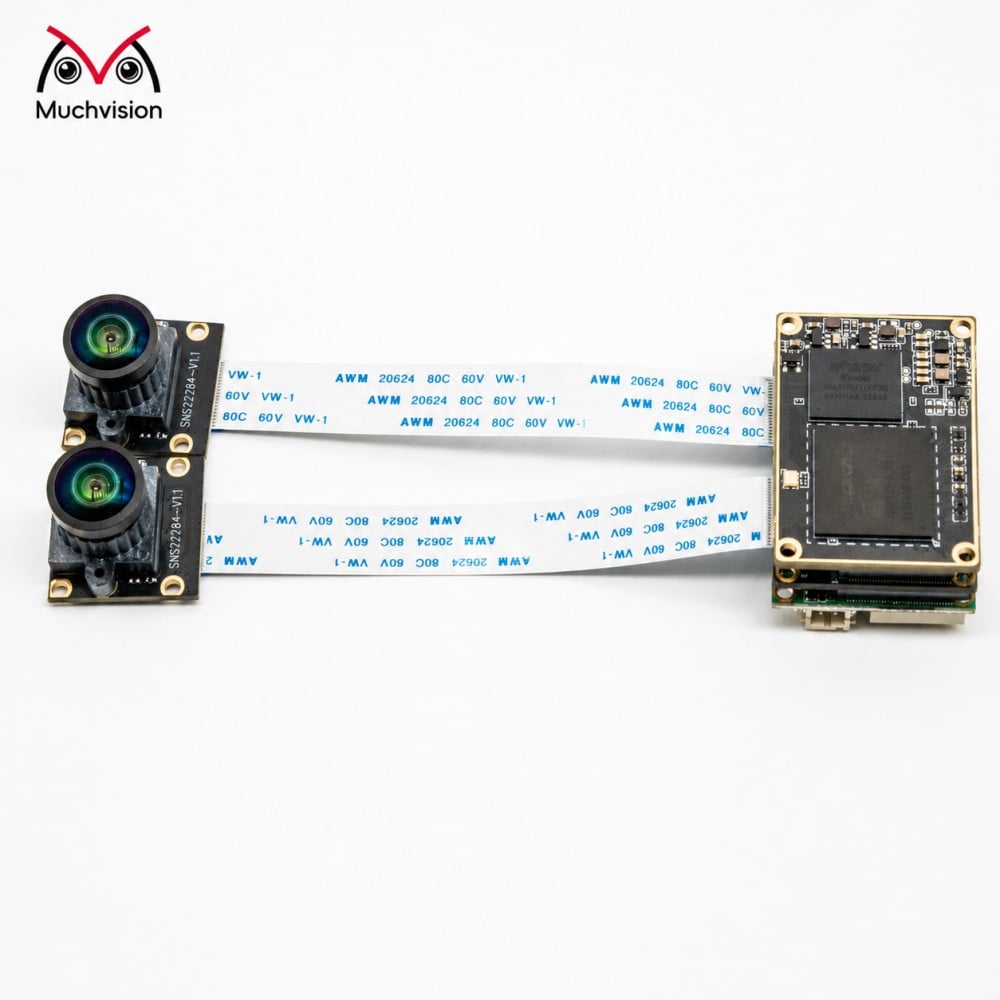
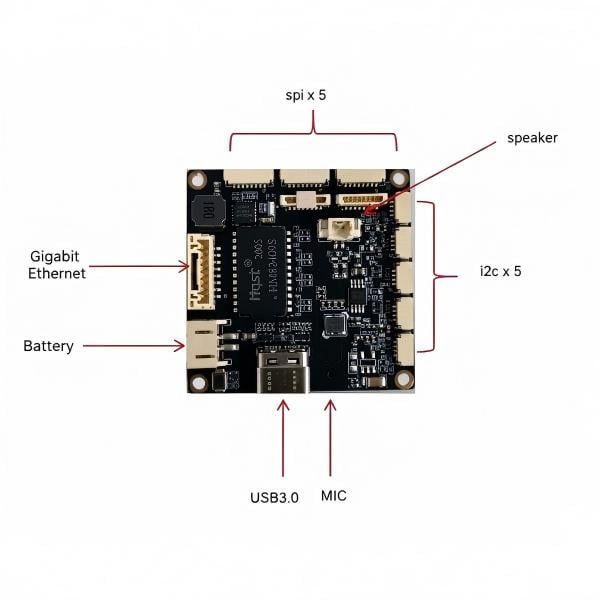
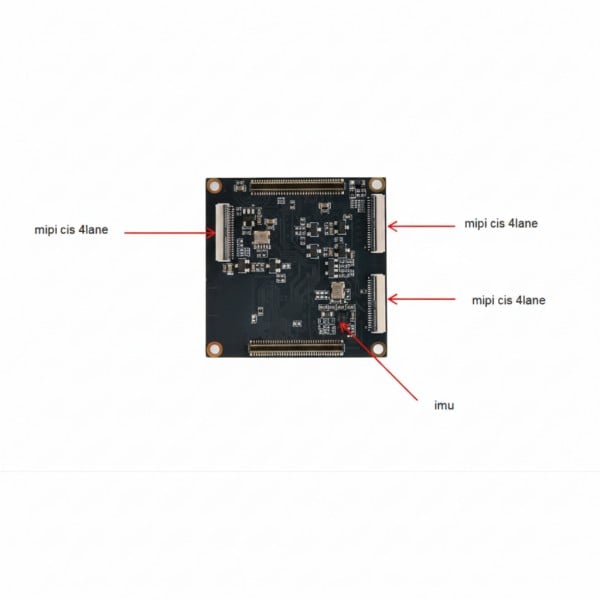
MV12-V1.0 ຜະລິດຕະພັນນີ້ແມ່ນເປັນເວທີຄຳນວນສຳລັບການປະສານງານດ້ານການເຫັນ ແລະ ການປະສານງານຫຼາຍຮູບແບບ (multi-modal interaction) ທີ່ມີຄວາມສອດຄ່ອງກັນທັງໝົດ 4 ຊ່ອງ (quad-channel synchronized), ມີພື້ນຖານຢູ່ໃນຊິບປະມວນຜົນທີ່ມີປະສິດທິພາບສູງ Rockchip RK3576. ມັນປະກອບດ້ວຍໜ່ວຍວັດແທກການເຄື່ອນໄຫວ (IMU - Inertial Measurement Unit) ທີ່ມີຄວາມຖືກຕ້ອງສູງ ແລະ ມີສະຫຼາບເຊື່ອມຕໍ່ກ້ອງ MIPI ທີ່ເປັນອິດສະຫຼະຕໍ່ກັນຈຳນວນ 4 ຊ່ອງ. ດ້ວຍເຄື່ອງຈັກການເລີ່ມຕົ້ນການສອດຄ່ອງກັນທີ່ຢູ່ໃນລະດັບຮາດແວ (hardware-level synchronization trigger mechanism), ມັນຮັບປະກັນການຈັດເວລາ ແລະ ສະຖານທີ່ (spatiotemporal alignment) ຂອງຂໍ້ມູນຈາກຫຼາຍຊ່ອງທີ່ເກີດຈາກການເຫັນ ແລະ ຂໍ້ມູນທ່າທີຂອງການເຄື່ອນໄຫວໃນລະດັບໄມໂຄວິນາທີ (microsecond-level).
ດ້ວຍຄວາມສາມາດທີ່ມີອຳນາດຂອງເຄື່ອງປະມວນຜົນ RK3576 ທີ່ມີ 8 ໂຄຣ (8-core heterogeneous architecture) ແລະ ຄວາມສາມາດດ້ານ AI computing, ລະບົບນີ້ບໍ່ພຽງແຕ່ສາມາດປະມວນຜົນສະຕຣີມວີດີໂອ HD ຈຳນວນຫຼາຍຢ່າງເປັນພາຍໃນ (parallel processing) ເທົ່ານັ້ນ, ແຕ່ຍັງສາມາດເຮັດວຽກອັລກີຣີດີມ SLAM mapping, VIO localization ແລະ AI inference ທີ່ສັບສົນໃນເວລາຈິງ (real-time) ຢູ່ທີ່ເທິງຂອງເຄື່ອງ (at the edge). ສິ່ງນີ້ໃຫ້ພື້ນຖານຂໍ້ມູນທີ່ເຂັ້ມແຂງສຳລັບການຮັບຮູ້ທີ່ຖືກຕ້ອງໃນສະພາບແວດລ້ອມທີ່ປ່ຽນແປງ.
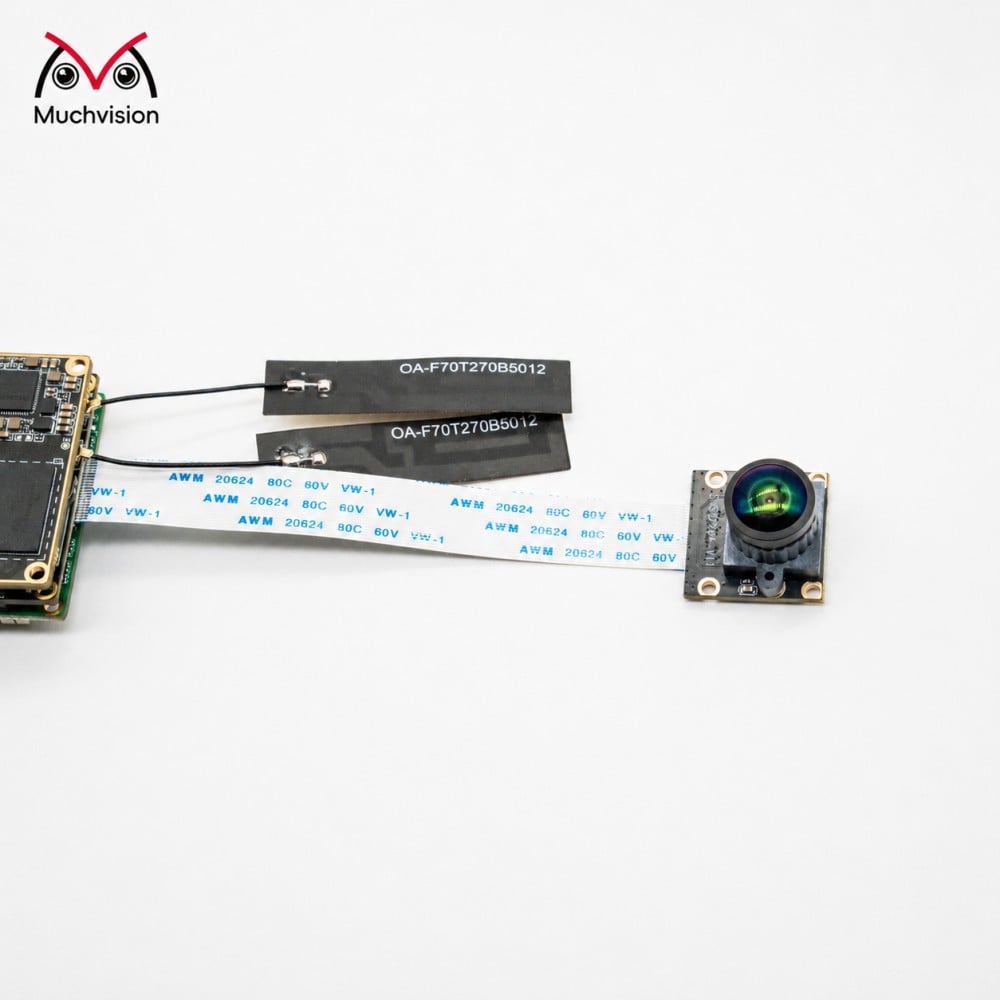
ເວທີນີ້ມີຄວາມເຂົ້າກັນໄດ້ດີເລີດກັບເຊັນເຊີແລະຄວາມຍືດຍຸ່ນຕໍ່ສະຖານະການຕ່າງໆ ສາມາດເລືອກເຊັນເຊີສະຫຼຸບທີ່ມີປະສິດທິພາບສູງໄດ້ຢ່າງມີຄວາມຍືດຍຸ່ນ ເພື່ອສ້າງວິທີແກ້ໄຂການຮັບຮູ້ທີ່ປັບແຕ່ງໄດ້ຕາມຄວາມຕ້ອງການ. ມັນເຂົ້າກັນໄດ້ກັບເຊັນເຊີແສງຕ່ຳ ແລະເຊັນເຊີຊັດເຕີໂລການ (global shutter) ຫຼາກຫຼາຍຊະນິດ ລວມທັງ IMX662, IMX464, OV9281, ແລະ AR0234. ພ້ອມກັນນີ້ ລະບົບຍັງມີການຊົດເຊີຍທ່າທາງ 6 ແກນ (6-axis attitude compensation) ຈາກ IMU ທີ່ຕິດຕັ້ງຢູ່ເທິງແຜງ ຊ່ວຍໃຫ້ລະບົບສາມາດຮັກສາຄວາມແນ່ນອນສູງໃນການກຳນົດຕຳແຫນ່ງຕົວເອງ ແລະການຮັບຮູ້ສະພາບແວດລ້ອມ ເຖິງແມ່ນຢູ່ໃນສະພາບການທີ່ຮຸນແຮງ ເຊັ່ນ: ພື້ນທີ່ບໍ່ມີສັນຍານ GPS ຫຼືການປ່ຽນແປງແສງສະຫວ່າງຢ່າງກະທັນຫັນ. ນອກຈາກນີ້ ແຜງຫຼັກຍັງມີສ່ວນຕໍ່ຂະຫຍາຍ SPI ແລະ I2C ຈຳນວນຫຼວງຫຼາຍ ພ້ອມທັງສະຫນັບສະຫນູນແບບເລີ່ມຕົ້ນສຳລັບແຖວໄມໂຄຣໂຟນ, ໂລດສະພາບເສີງ, ແລະມົດູນການຄຸ້ມຄອງການໄຫຼ່ໄຟ. ການອອກແບບທີ່ລວມເອົາທຸກຢ່າງນີ້ ເຮັດໃຫ້ອຸປະກອນມີຄວາມສາມາດໃນການ "ໄດ້ຍິນ" ແລະ "ເວົ້າ" ໄດ້ ປ່ຽນຈາກເຄື່ອງຮັບຮູ້ພຽງແຕ່ດ້ານທາງສາຍຕາ ເປັນອຸປະກອນອັດສະຈັນທີ່ສາມາດມີປະສົມປະສານດ້ານສຽງ, ສະແດງສະພາບການ, ແລະດຳເນີນການເຄື່ອນທີ່ໄດ້ ຊ່ວຍຫຼຸດຜ່ອນຄວາມສັບສົນຂອງການອອກແບບວົງຈອນອຸປະກອນຕ່ອຍໄດ້ຢ່າງຫຼວງຫຼາຍ.
ດ້ວຍຄວາມໄດ້ປຽດທີ່ຄົບຖ້ວນຂອງ "ພະລັງການຄຳນວນສູງ + ການລວມຫຼາຍເຊີສີເຕີ + ການຊື່ອງເວລາຂອງຮາດແວ + ການປະສານງານທີ່ຫຼາກຫຼາຍ" ຜະລິດຕະພັນນີ້ໄດ້ເຮັດໃຫ້ເກີດການພັດທະນາຢ່າງກ້າວຫນ້າໃນດ້ານຕ່າງໆ ເຊັ່ນ: AI ທີ່ມີຮ່າງກາຍ, ການກວດສອບອຸດສາຫະກຳ ແລະ ການຂັບຂີ່ອັດຕະໂນມັດ. ໃນການນຳໃຊ້ກັບຫຸ່ນຍົນທີ່ມີຮູບຮ່າງຄືຄົນ, ມັນເປັນຫົວໃຈຂອງການຮັບຮູ້, ເຊິ່ງເຮັດໃຫ້ສາມາດຫຼີກເວີ່ນສິ່ງກີດຂວາງໄດ້ໃນເວລາທີ່ແຕກຕ່າງກັນເປັນມີລິຊະວິນາທີ່ແລະຈັບວັດຖຸໄດ້ຢ່າງຖືກຕ້ອງເມື່ອໃຊ້ຮ່ວມກັບກ້ອງທີ່ມີຄວາມໄວໃນການຖ່າຍຮູບສູງ (global shutter cameras), ແລະຍັງສາມາດເຮັດໃຫ້ການປະສານງານລະຫວ່າງຄົນ ແລະ ເຄື່ອງຈັກເກີດຂຶ້ນຢ່າງທຳມະຊາດຜ່ານໝາກເຕືອນສຽງ. ສຳລັບການກວດສອບອຸດສາຫະກຳທີ່ເຮັດໄດ້ທຸກສະພາບອາກາດ, ມັນໃຊ້ເຊີສີເຕີທີ່ມີຄວາມໄວໃນການຮັບຮູ້ເຖິງແສງທີ່ອ່ອນເປັນພິເສດ (starlight-grade sensors) ເພື່ອຮັບປະກັນຄວາມປອດໄພດ້ານການເບິ່ງເຫັນໃນເວລາກາງຄືນ, ແລະໃນເວລາດຽວກັນນີ້ກໍຈະສົ່ງສຽງເຕືອນເມື່ອພົບເຫັນສິ່ງຜິດປົກກະຕິຜ່ານລະບົບສຽງ. ໃນດ້ານການຂັບຂີ່ອັດຕະໂນມັດ ແລະ ລົດຈັດສົ່ງສິນຄ້າທີ່ມີຄວາມໄວຕ່ຳ, ມັນສາມາດບັນລຸການເບິ່ງທົ່ວທິດທາງ 360 ອົງສາ ແລະ ການນຳທາງທີ່ມີຄວາມຖືກຕ້ອງສູງດ້ວຍການລວມຂໍ້ມູນຈາກຫຼາຍກ້ອງ. ບໍ່ວ່າຈະເປັນການຄົ້ນຄວ້າ ຫຼື ການນຳໃຊ້ໃນເຊີງການຄ້າ, ແຜດຟອມນີ້ເປັນທາງເລືອກທີ່ເໝາະສົມທີ່ສຸດສຳລັບການແກ້ໄຂບັນຫາທີ່ສັບສົນດ້ານການເບິ່ງເຫັນຂອງເຄື່ອງຈັກ ແລະ ການຂະຫຍາຍຂອບເຂດຂອງການປະສານງານ.
ສະຖານະການໃຊ້ງານ
ຜະລິດຕະພັນເທີມິນາລທີ່ສາມາດເບິ່ງເຫັນໄດ້ ສຳລັບອຸດສາຫະກຳດ້ານການເງິນ, ສື່ມວນຊົນ, ການຈ່າຍເງິນ, ການຄ້າປີກ, ການຄວບຄຸມອຸດສາຫະກຳ, ການສຶກສາ, ລັດຖະບານ/ອົງການ, ແລະ ສາຂາສຸຂະພາບ. ມັນເໝາະສຳລັບການນຳໃຊ້ໃນດ້ານຕ່າງໆ ເຊັ່ນ: ສິ່ງມີຊີວິດທີ່ເຮັດດ້ວຍເຕັກໂນໂລຢີ, ການຄ້າປີກອັດສະສະເຕີ, ເຄື່ອງຖ່າຍຮູບທີ່ມີມຸມກວ້າງ, ສາງທີ່ບໍ່ມີຄົນຂັບ, ການຈັດລຽງແລະຈັດສົ່ງທີ່ເປັນເອກະລາດ, ແລະ ອຸປະກອນ UAV ທີ່ເປັນອັດຕະໂນມັດ
 |
 |
 |
 |
 |
 |
 |
 |
 |
ຂໍ້ມູນຈຸດປະສົງມາດຕະຖານ
| ຂໍ້ມູນພື້ນຖານ | |
| CPU | ໂປເຊສເຊີ 8 ແກນ 64-bit (4×A72 + 4×A53), ມີຄວາມໄວສູງສຸດ 2.2 GHz |
| GPU | G52 MC3 @ 1GHz, ສະໜັບສະໜູນ OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | ພະລັງການຄຳນວນ NPU 6 TOPS, ສະໜັບສະໜູນການດຳເນີນງານ INT4/INT8/INT16/FP16/BF16/TF32; ສາມາດເຮັດວຽກຮ່ວມກັນດ້ວຍ 2 ແກນ ຫຼື ດຳເນີນງານອິດສະຫຼະ; ສະໜັບສະໜູນການດຳເນີນງານຫຼາຍວຽກ ແລະ ການດຳເນີນງານແບບຄູ່ song ໃນບ່ອນຕ່າງໆ |
| ISP | ຕິດຕັ້ງ ISP ພາຍໃນ 16 ລ້ານພິກເຊີ, ສະໜັບສະໜູນການຫຼຸດຜ່ອນສຽງຮູ້ສຶກໃນສະຖານທີ່ທີ່ມີແສງນ້ອຍ, ເຊີນເຊີ RGB-IR, ແລະ HDR ສູງເຖິງ 120 dB. ISP ທີ່ມີ AI ປັບປຸງຄຸນນະພາບຮູບພາບດ້ວຍການຫຼຸດຜ່ອນສຽງຮູ້ສຶກ |
| ຄວາມຊົງຈໍາ | LPDDR4/LPDDR4x/LPDDR5 (ເລືອກໄດ້: 4GB/8GB/16GB) |
| ຕູ້ເກັບຂອງຕິດຕັ້ງພາຍໃນ | eMMC (ເລືອກໄດ້: 16GB/32GB/64GB/128GB/256GB) |
| ການເຂິ່ນວີດີໂອ | ການຖອດລະຫັດວີດີໂອ: 8K@30fps/4K@120fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60fps (H.264/AVC) ການຖອດລະຫັດວີດີໂອ: 4K@60fps (H.265/HEVC, H.264/AVC) ການຖອດລະຫັດຮູບພາບ: 4K@60fps MJPG |
| ພະລັງງານ | DC 5V |
| OS | ສະໜັບສະໜູນເຄື່ອງແຖວ RTLinux ດ້ວຍປະສິດທິພາບເວລາຈິງທີ່ດີເລີດ, ໃຊ້ຢ່າງກວ້າງຂວາງໃນການນຳໃຊ້ດ້ານອຸດສາຫະກຳ. ສະໜັບສະໜູນລະບົບປະຕິບັດ Linux ແລະ Buildroot ເພື່ອໃຫ້ສະພາບແວດລ້ອມລະບົບທີ່ປອດໄພ ແລະ ມີຄວາມສະຖຽນໃນການພັດທະນາຜະລິດຕະພັນ ແລະ ການຜະລິດ. ມີຄວາມສາມາດໃໝ່ດ້ານອຸດສາຫະກຳເຊັ່ນ: ການເຊື່ອມຕໍ່ເຄື່ອຂ່າຍເວລາຈິງ, Flexbus, ການແຍກແຍະຊັບພະຍາກອນຮາດແວ, ແລະ DSMC, ເພື່ອຕອບສະຫນອງຄວາມຕ້ອງການທີ່ຫຼາກຫຼາຍຂອງການນຳໃຊ້ດ້ານອຸດສາຫະກຳ. |
| ຂະໜາດ | 41mm × 41mm × 20mm |
| ສະໜັບສະໜູນກ້ອງ | ສາມຊ່ອງ, ສອງເສັ້ນສະເປັກ mipi: OV9281, IMX662, AR0234, IM464 ແລະ ອື່ນໆ, ສາມາດປັບແຕ່ງຕາມຄວາມຕ້ອງການ |
| IMU Gyroscope | ໄຈໂຣສະກອັບ 4 ຕົວຈາກຊຸດ TDK ICM42670 |
| Ethernet | 1 ຊ່ອງເຄື່ອງເຊື່ອມຕໍ່ເຄື່ອຂ່າຍ Ethernet ຄວາມໄວ 1 ກິກະບີຕ໌ (ເຊື່ອມຕໍ່ຜ່ານເຕັກເຊື່ອມຕໍ່ Wafer socket 8P-1.25 ມມ) |
| Wi-Fi / PDA | ຕິດຕັ້ງມາດູນ WiFi ພາຍໃນທີ່ສະຫນັບສະຫນູນ WiFi 6 ສອງແບນດ໌ (802.11a/b/g/n/ac/ax) ທີ່ 2.4 GHz ແລະ 5 GHz, ພ້ອມດ້ວຍການສະຫນັບສະຫນູນ Bluetooth |
| USB | ໂປຣແກຣມ USB 3.0 ປະເພດ-C ໜຶ່ງຊ່ອງ (ສະຫນັບສະຫນູນ ADB) |
| ແອນເຕັນ | ເສັ້ນທາງ 1 |
| ປຸ່ມກົດ | ປຸ່ມ 1 |
| ສະຖານີສື່ສານ SPI | 5pcs |
| ອິນເຕີເຟດ I2C | 5pcs |
| MIC | ໄມໂຄຣໂຟອນດິຈິຕອລ 1 ຕົວ |
| SPK | ເສີຍງແຕ່ລະທາງທີ່ 1 (2P ພ້ອມກັບໄລຍະຫ່າງລະຫວ່າງຂາເຊື່ອມ 1.25 ມມ) |
:size ຂອງ ເindsight
 |
 |
 |
ຄຳອະທິບາຍສຳລັບສະຫນາມ
 |
 |
ຄວາມສັງວັນ
ຄຸນສະພາບແวดล້ອມ
ອຸນຫະພູມ
ອຸນຫະພູມໃນເວລາໃຊ້ງານ: 0℃ ເຖິງ +40℃
ອຸນຫະພູມໃນເວລາຈັດເກັບ: -20℃ ເຖິງ +70℃
ຄວາມຊື້ນໃນເວລາຈັດເກັບ
ຄວາມຊື້ນໃນເວລາໃຊ້ງານ: 10% ເຖິງ 90% (ບໍ່ມີນ້ຳຄອງ)
ເກ็บຮັກສາ: 5% ເຖື່ອ 95% (ບໍ່ມີການລວມຕົວ)
ລະດັບຄວາມສູງ
ການໃຊ້ງານ: 10,000 ຟຸດ (ສູງສຸດ)
ເກບຮັກສາ: 20,000 ຟຸດ (ສູງສຸດ)
ອຸນຫະພູມສູງ ແລະ ການເກັບຮັກສາ
ວິທີການທົດສອບ ແລະ ໂພສສະພາບ ກະລຸນາເບິ່ງຄຳອະທິບາຍຂອງ GB2423.2 “ການທົດສອບ Bd & Bb”
ອຸນຫະພູມຕ່ຳ ແລະ ການເກັບຮັກສາ
ວິທີການທົດສອບ ແລະ ໂພສສະພາບ ກະລຸນາເບິ່ງຄຳອະທິບາຍຂອງ GB2423.1 “ການທົດສອບ Ad & Ab”
ການທົດສອບຄວາມຊື້ນ ແລະ ອຸນຫະພູມ
ວິທີການທົດສອບ ແລະ ໂພສສະພາບ ກະລຸນາເບິ່ງຄຳອະທິບາຍຂອງ GB2423.3 “ການທົດສອບ Ca” ແລະ GB2423.22 “ການທົດສອບ Nb”
ຄຳແນະນຳສຳລັບການປະກອບ ແລະ ການໃຊ້ງານ
ໃນຂະນະທີ່ຕິດຕັ້ງ ແລະ ໃຊ້ງານ ກະລຸນາສັງເກດ ແລະ ກວດສອບຈຸດທີ່ອາດເກີດບັນຫາຕໍ່ໄປນີ້ (ບໍ່ຈຳກັດເຖິງເຫຼົ່ານີ້):



