






- Oversigt
- Anbefalede Produkter
- PCBA og elektroniske komponenter er meget følsomme over for elektrostatiske udladninger (ESD). Operatører skal bære ESD-tilslutningsbånd eller handsker, inden de håndterer kort eller udfører montage, for at sikre korrekt afledning af statisk elektricitet.
- Undgå deformation af hovedkortet under installations- og fastgørelsesprocessen på grund af fastgørelsesårsager;
- Sørg for korrekt MIPI-grænsefladejustering under kamerainstallation. Kontroller retningen af pin 1;
- B2B-konnektor-montage: Følg rækkefølgen "saml først, skru derefter fast". Juster og tryk konnektorerne sammen, så de sidder helt fast, inden de fire skruer i hjørnerne strammes. Dette sikrer, at konnektoren kan klare vibrationspåvirkning, mens skruerne primært støtter vægten.
- Ved installation af perifere enheder (USB, IO osv.) skal du være opmærksom på perifere IO-niveauer og strømudgangsproblemer;
- Ved installation af serielporten skal du være opmærksom på, om RS232- og TTL-enhederne er direkte forbundet, om TX- og RX-forbindelsesmetoderne er korrekte, og om spændingsniveauet er korrekt;
- Om inputstrømmen er tilsluttet strømindgangsgrænsen og om inputspænding, strøm mv. opfylder kravene i henhold til de samlede perifere enheder.
Beskrivelse
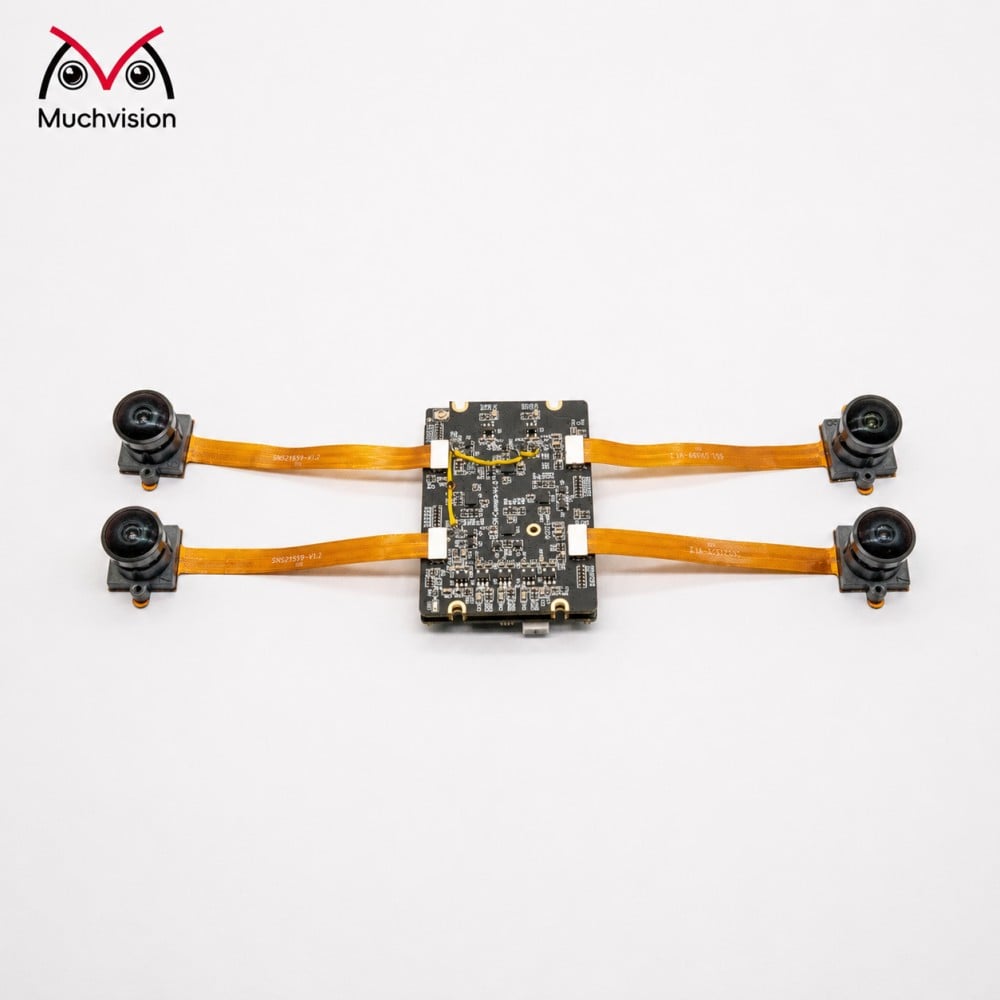
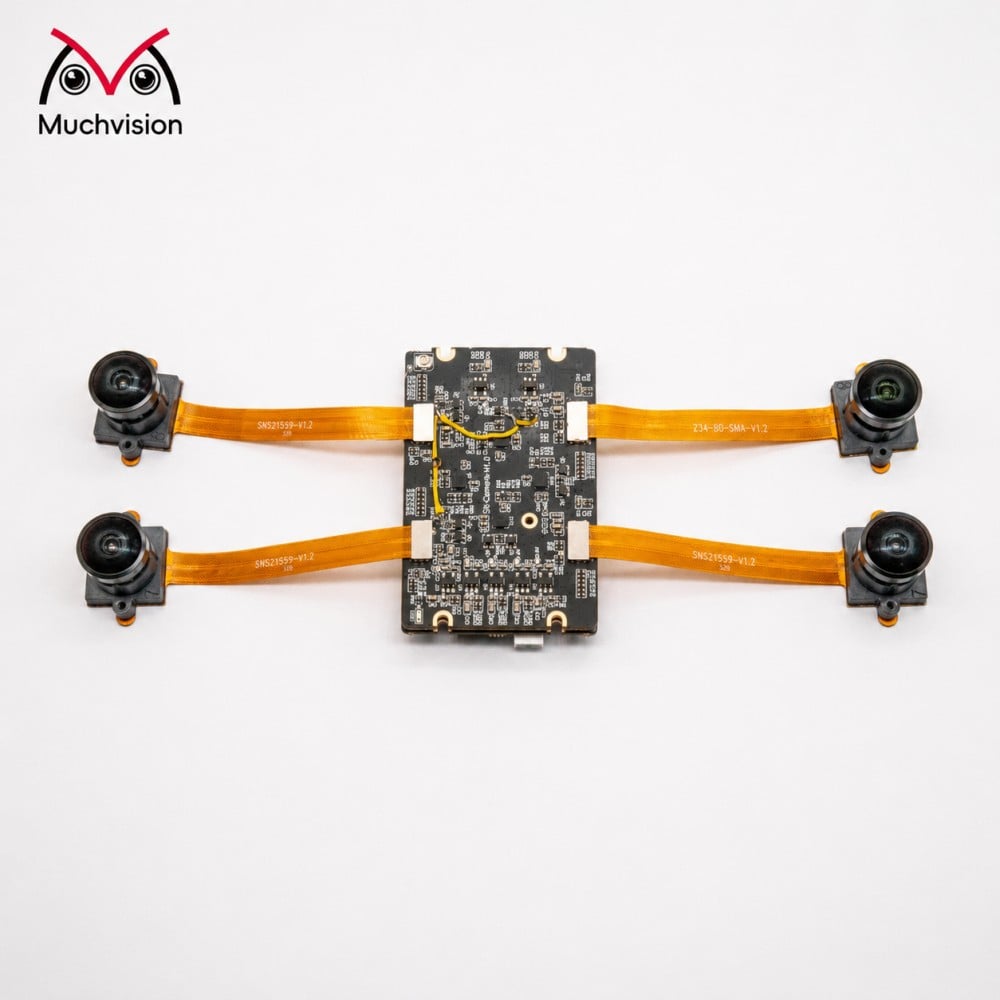
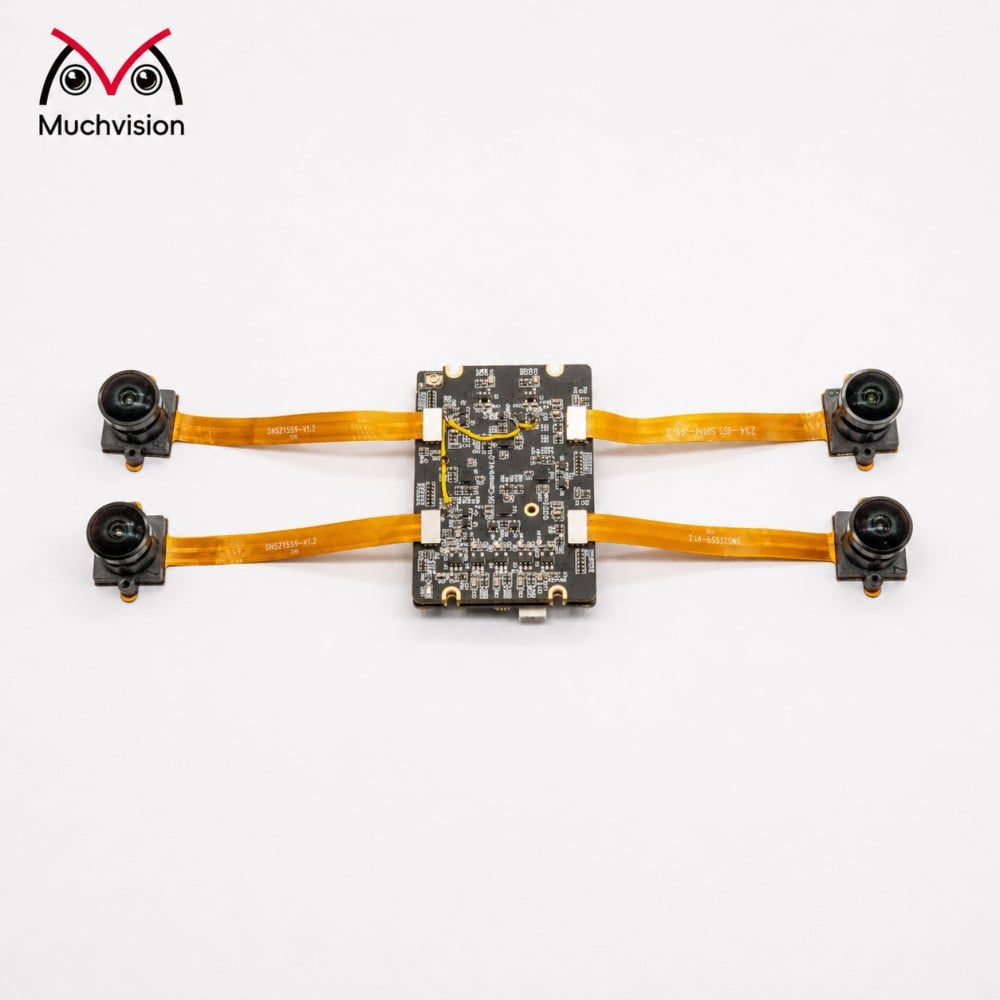
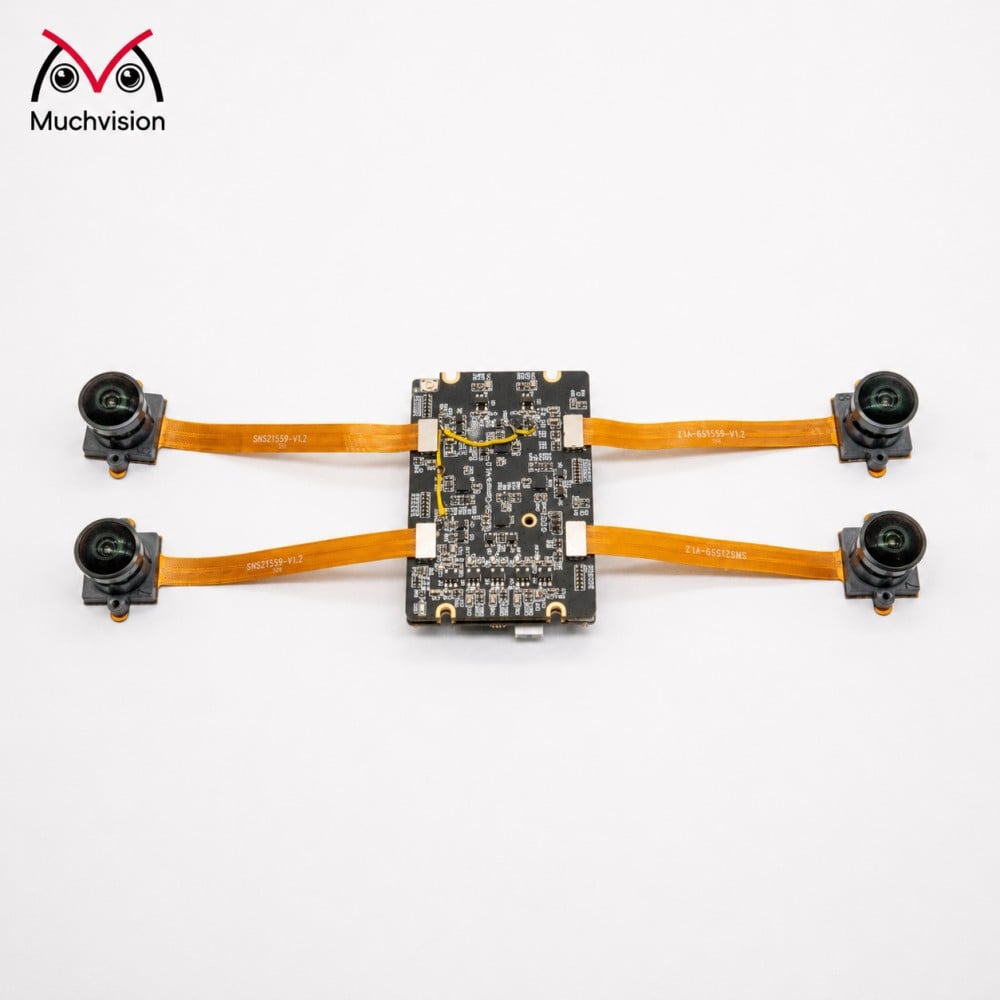
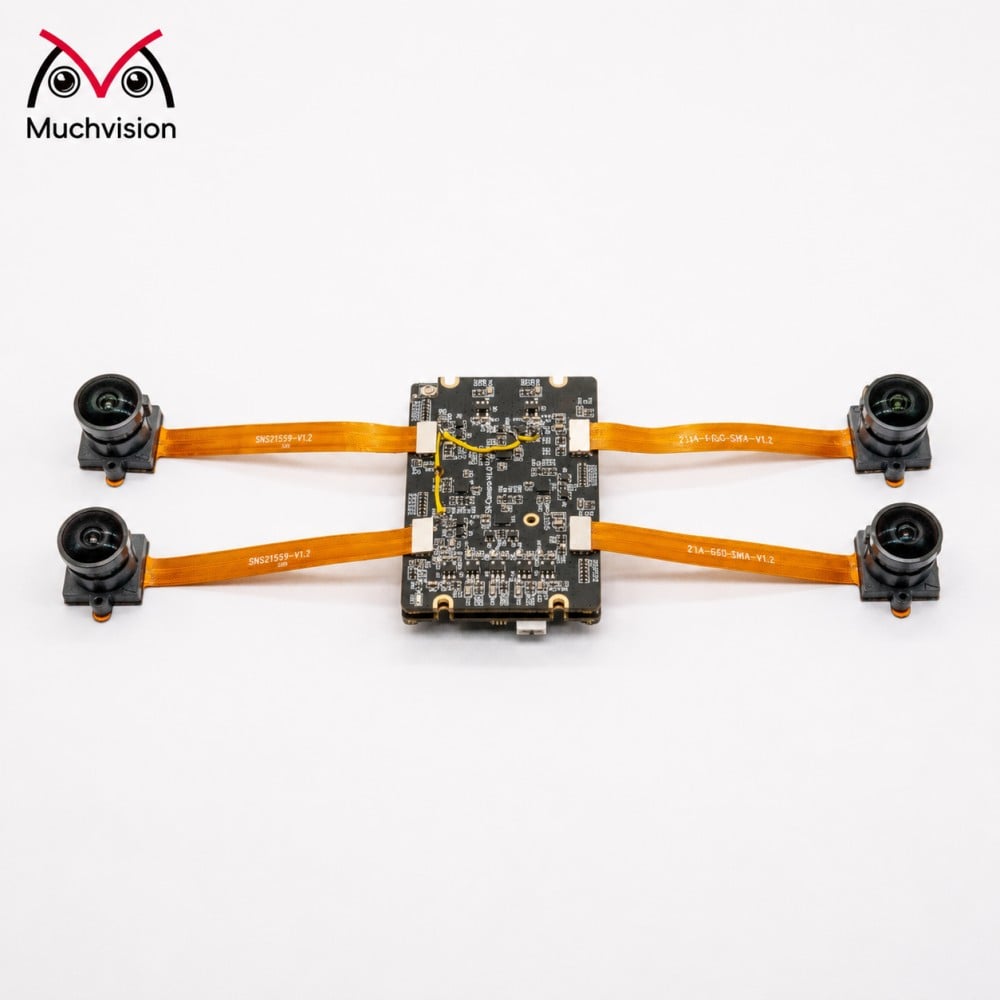
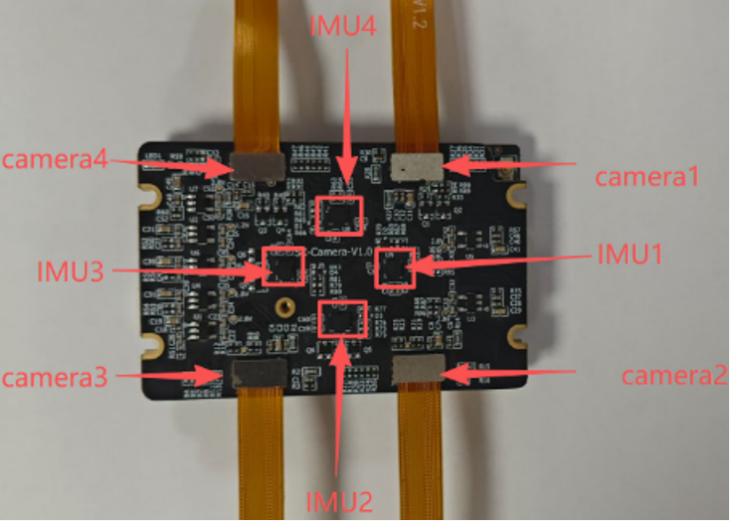
MV11-V1.0 Dette produkt er en firkantet synkroniseret visuel-inertiel navigationsfusionsberegningplatform, bygget på den højtydende Rockchip RK3576-procesor. Den integrerer en præcisions-IMU (Inertial Measurement Unit) med fire separate MIPI-kamerainterfaces. Gennem en hardwarebaseret synkroniseringstriggermekanisme sikres mikrosekundniveauets rumlig-tidsmæssige justering mellem multikanals visuelle billeder og bevægelses- og holdningsdata.
Ved at udnytte RK3576’s kraftfulde 8-kernede heterogene arkitektur og AI-beregningskapacitet understøtter systemet ikke kun parallell behandling af flere HD-videostrømme, men kører også komplekse SLAM-kortlægnings-, VIO-lokaliserings- og AI-inferensalgoritmer i realtid ved kanten. Dette giver et solidt datagrundlag for præcis perception i dynamiske miljøer.
Produktet fremhæver en fremragende kompatibilitet med sensorer og tilpasningsevne til forskellige scenarier og understøtter fleksibel valg af almindelige højtydende sensorer til at opbygge tilpassede perceptionsløsninger. Det er kompatibelt med en række sensorer til lavt lys og global lukker, herunder IMX662, IMX464, OV9281 og AR0234. I kombination med den 6-akselige holdningskompensation, som den integrerede IMU leverer, opretholder systemet en præcis selvlokalisering og miljøperception også under ekstreme forhold, såsom områder uden GPS-dækning eller kraftige ændringer i belygningen. Med de omfattende fordele ved »høj beregningskapacitet + flersensorfusion + hardware-synkronisering« styrker dette produkt avancerede områder såsom Embodied AI, industriinspektion og autonom kørsel. I humanoidrobotapplikationer fungerer det som en kerneperceptionsenhed og muliggør undvigelse af forhindringer på millisekundniveau og præcis grebning, når det kombineres med kameraer med global lukker. Til industriel inspektion under alle vejrforhold anvender det stjernelysniveausensorer for at sikre visuel sikkerhed under natlige operationer. Inden for lavhastighedsautonom kørsel og logistikfartøjer opnår det et 360°-omkringliggende syn og præcis navigation gennem visuel fusion fra flere kameraer. Uanset om det bruges til forskning og udvikling eller kommerciel implementering, er denne platform et ideelt valg til løsning af komplekse maskinvisionudfordringer.
Anvendelsesscenarier
Visuelt aktiverede terminalprodukter inden for finans, medier, betalingsløsninger, detailhandel, industrielle styresystemer, uddannelse, offentlig sektor/erhverv og sundhedsvæsen. Produktet er velegnet til anvendelsesområder såsom humanoide robotter, intelligent detailhandel, panoramakameraer, ubemandede lagerfaciliteter, intelligent sortering og udlevering samt automatiserede UAV-udstyr.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Standardparametre
| Kerneparametre | |
| CPU | Ottekerners 64-bit-processer (4×A72 + 4×A53) med en maksimal klokkehastighed på 2,2 GHz |
| GPU | G52 MC3 @ 1 GHz; understøtter OpenGL ES 1.1/2.0/3.2, OpenCL 2.0 og Vulkan 1.1 |
| NPU | nPU med beregningskraft på 6 TOPS, der understøtter INT4/INT8/INT16/FP16/BF16/TF32-operationer; kan fungere i samarbejde med to kerner eller som selvstændig enhed; understøtter multitasking og parallell behandling i forskellige scenarier |
| Isp | Udstyret med en indbygget 16-megapixel ISP, der understøtter støjreduktion ved lav belysning, en RGB-IR-føler og HDR op til 120 dB. Den AI-drevne ISP forbedrer billedkvaliteten og reducerer støj. |
| hukommelse | LPDDR4/LPDDR4x/LPDDR5 (4 GB/8 GB/16 GB valgfrit) |
| Indbygget lager | eMMC (16 GB/32 GB/64 GB/128 GB/256 GB valgfrit) |
| Video kodning | Videodekodning: 8K@30 fps/4K@120 fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60 fps (H.264/AVC) Videodekodning: 4K@60 fps (H.265/HEVC, H.264/AVC) Billeddekodning: 4K@60 fps MJPG |
| effekt | DC 5V |
| OS | Understøtter RTLinux-kernen med fremragende realtidsydelse og bruges bredt i industrielle applikationer. Understøtter Linux-operativsystemet og Buildroot for at sikre en sikker og stabil systemmiljø for produktudvikling og produktion. Den indeholder nye industrielle funktioner såsom realtidsnetværk, Flexbus, hardwareressourcisolation og DSMC, hvilket opfylder mangfoldige industrielle applikationskrav. |
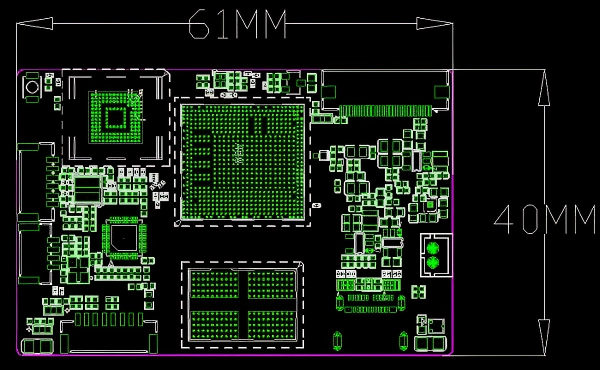
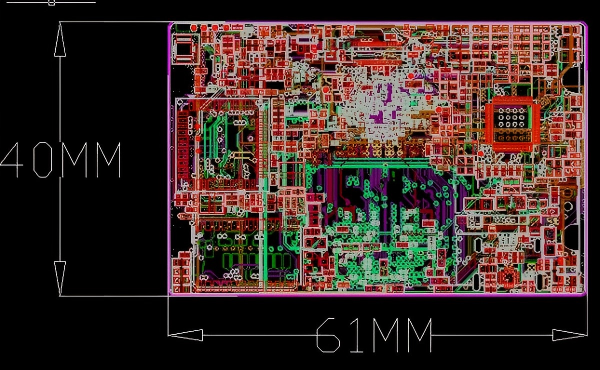
| størrelse | 61 mm × 40 mm × 9 mm |
| Støtte kamera | 4-kanals, 2-lanes MIPI-grænseflade: OV9281, IMX662, AR0234, IM464 osv., understøtter tilpasning |
| IMU-gyroskop | 4 gyroskoper fra TDK-serien ICM42670 |
| Ethernet | 1 × Gigabit Ethernet-port (tilsluttet via en 8P-1,25 mm Wafer-stikforbindelse) |
| Wifi/PDA | Udstyret med en indbygget WiFi-module, der understøtter dual-band WiFi 6 (802.11a/b/g/n/ac/ax) ved 2,4 GHz og 5 GHz samt Bluetooth-understøttelse. |
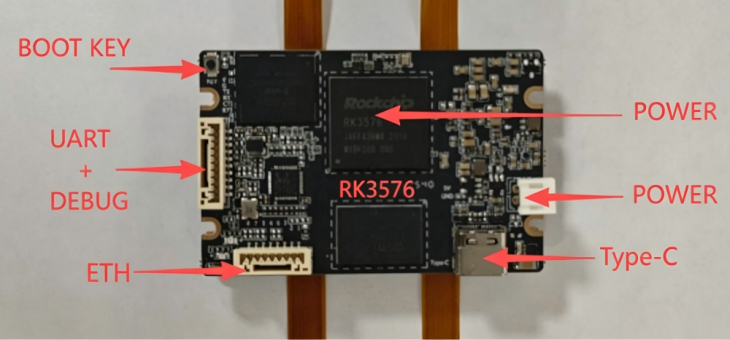
| USB | 1 ekstern Type-C USB 3.0-port (understøtter ADB) |
| antenne | Rute 1 |
| trykknap | Knap 1 |
| Andre grænseflader | 1 UART-kanal, 1 fejlfindingsskanal |
Hovedkortstørrelse
 |
 |
Grænsefladebeskrivelse
 |
 |
Forsigtighedsforanstaltninger
Miljømæssige egenskaber
Temperatur
Driftstemperatur: 0 °C til +40 °C
Opbevaring: -20 ℃ til +70 ℃
Fugtighed ved opbevaring
Drift: 10 % til 90 % (ikke-kondenserende)
Opbevaring: 5 % til 95 % (ikke-kondenserende)
Højde
Drift: 10.000 ft. (maks.)
Opbevaring: 20.000 ft. (maks.)
Høj temperatur og opbevaring
Testmetode og -betingelser, se beskrivelsen af GB2423.2 „Test Bd og Bb“
Lav temperatur og opbevaring
Testmetode og -betingelser, se beskrivelsen af GB2423.1 „Test Ad og Ab“
Fugtigheds- og temperaturtest
Testmetode og -betingelser henvises til beskrivelsen i GB2423.3 "Test Ca" og GB2423.22 "Test Nb"
Forholdsregler for montage og brug
Under montage og brug skal følgende (men ikke udelukkende) punkter overvåges og kontrolleres:



