






- Oversikt
- Anbefalte produkter
- PCBA-er og elektroniske komponenter er svært følsomme for elektrostatiske utladninger (ESD). Operatører må bruke ESD-pulsbånd eller -hansker før de håndterer kort eller utfører montering, for å sikre riktig statisk utladning.
- Unngå deformasjon av hovedkortet under installering og festing, forårsaket av festemidler.
- Sørg for riktig justering av MIPI-grensesnittet under kamerainstallering. Kontroller retningen til pin 1.
- B2B-koblemonteringssett: Følg rekkefølgen «koble først, skru deretter». Juster og trykk koblerne sammen for å sikre full innkobling før du strammer de fire hjørneskruene. Dette sikrer at koblingen tåler vibrasjonsbelastning, mens skruene hovedsakelig støtter vekten.;
- Ved montering av tilbehør (USB, IO, ETC) må du ta hensyn til IO-nivåer og strømutsendelsesproblemer for tilbehøret;
- Ved montering av serielporten må du sjekke om RS232- og TTL-enheter er direkte koblet, om TX- og RX-tilkoblingsmetodene er riktige, og om spenningsnivået er korrekt;
- Sjekk om inngangsspenningen er tilkoblet kraftinngangsporten, og om inngangsspenning, strøm osv. oppfyller kravene i henhold til det totale antallet tilkoblede tilbehør.
Beskrivelse
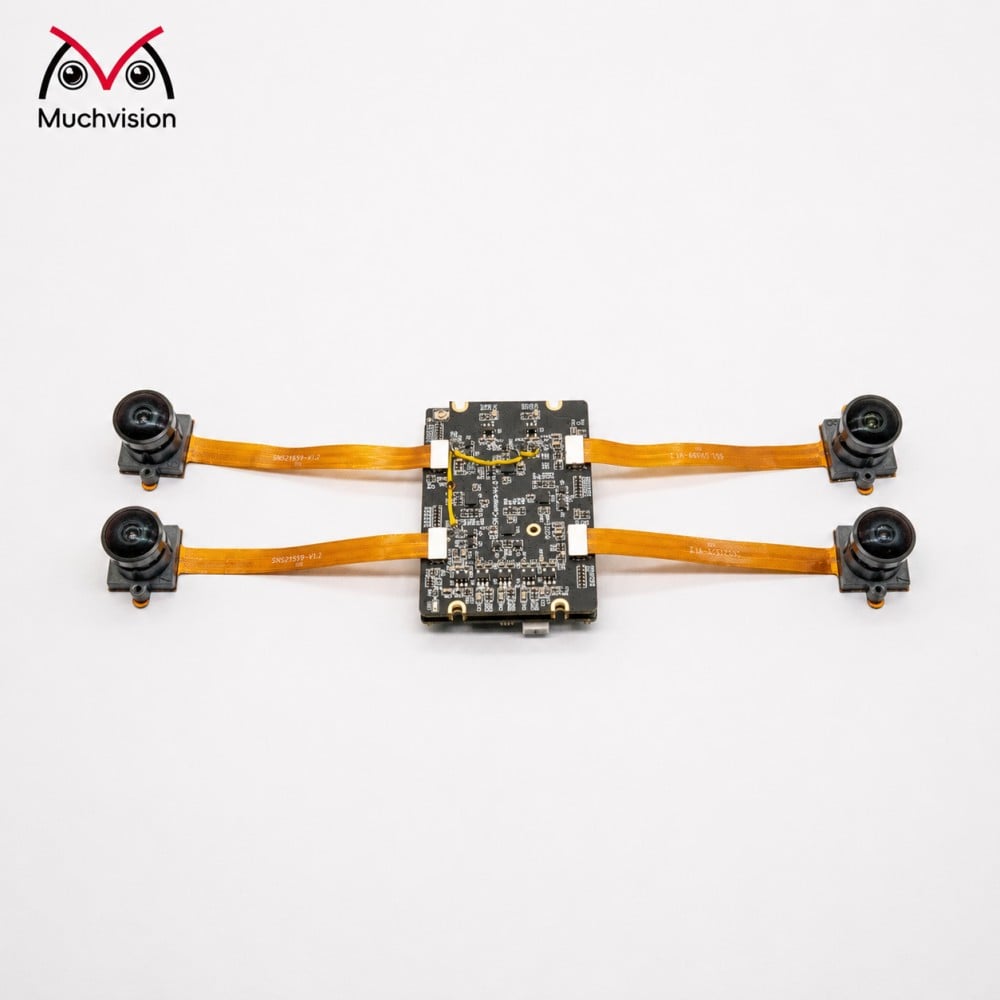
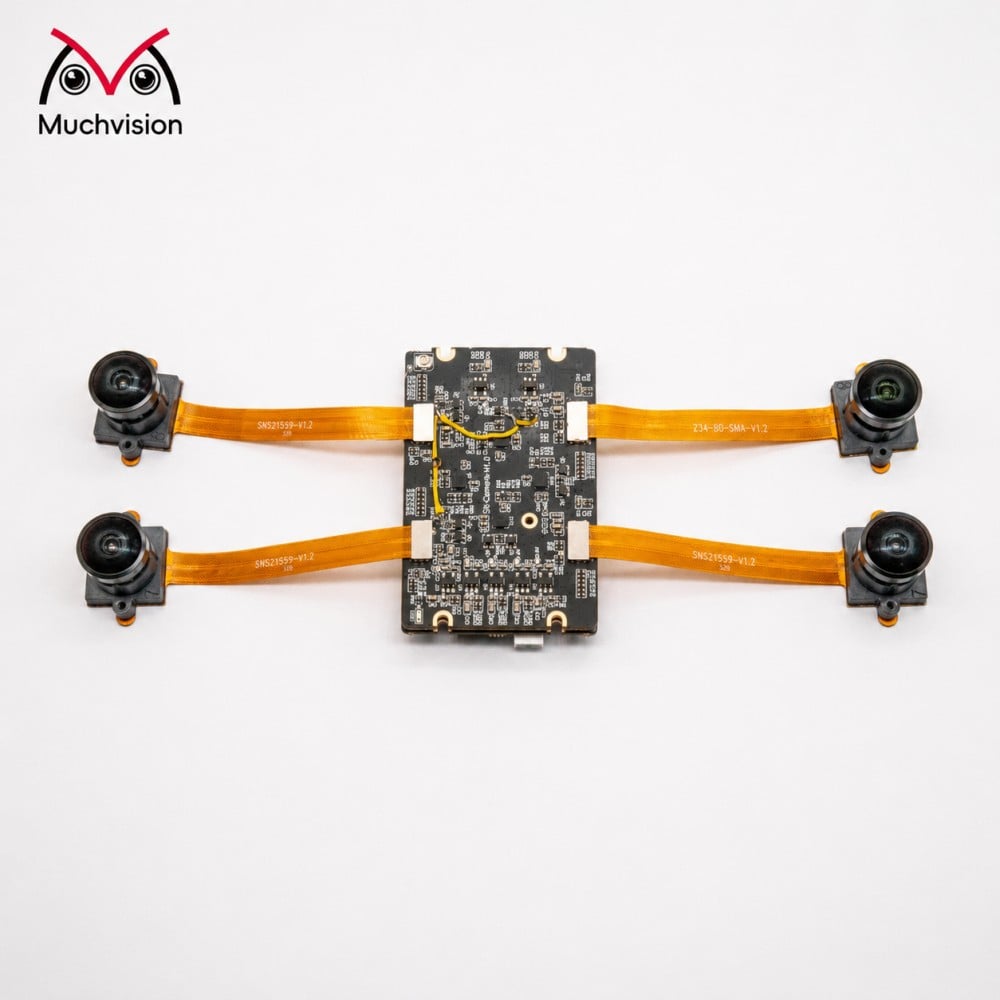
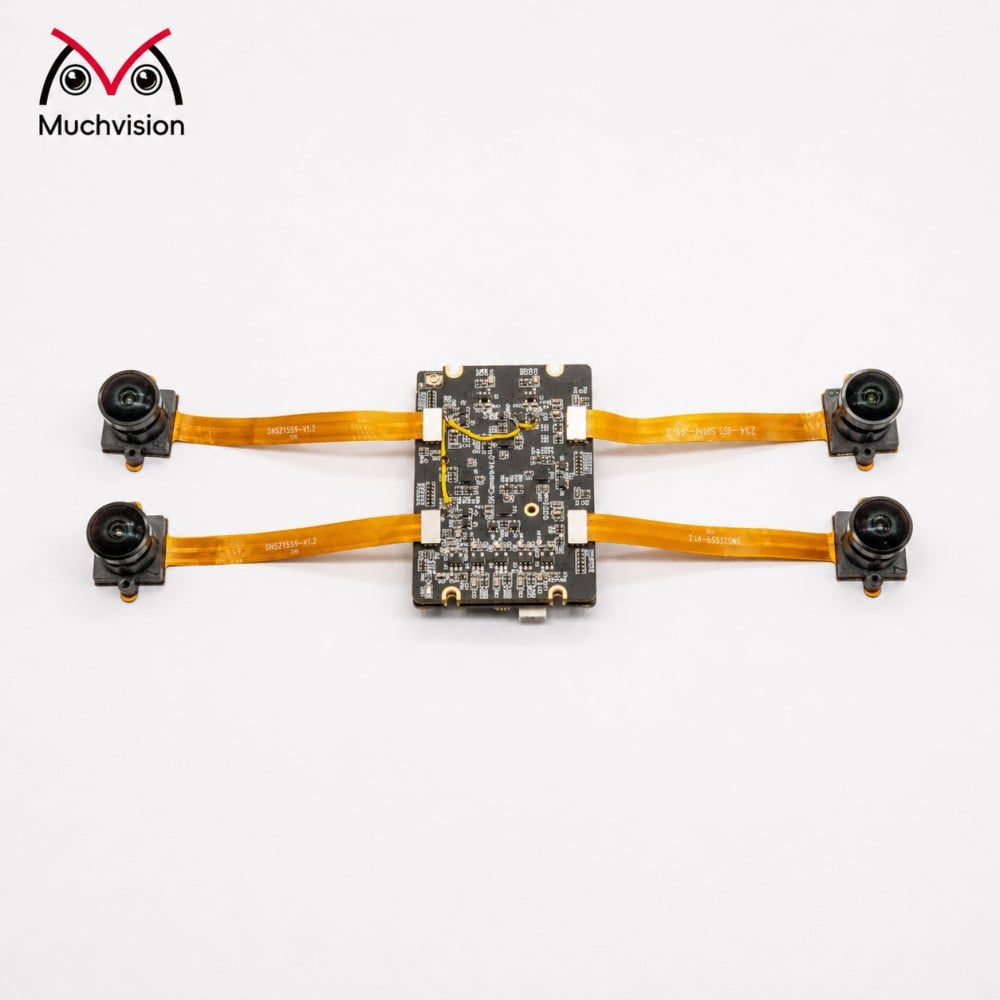
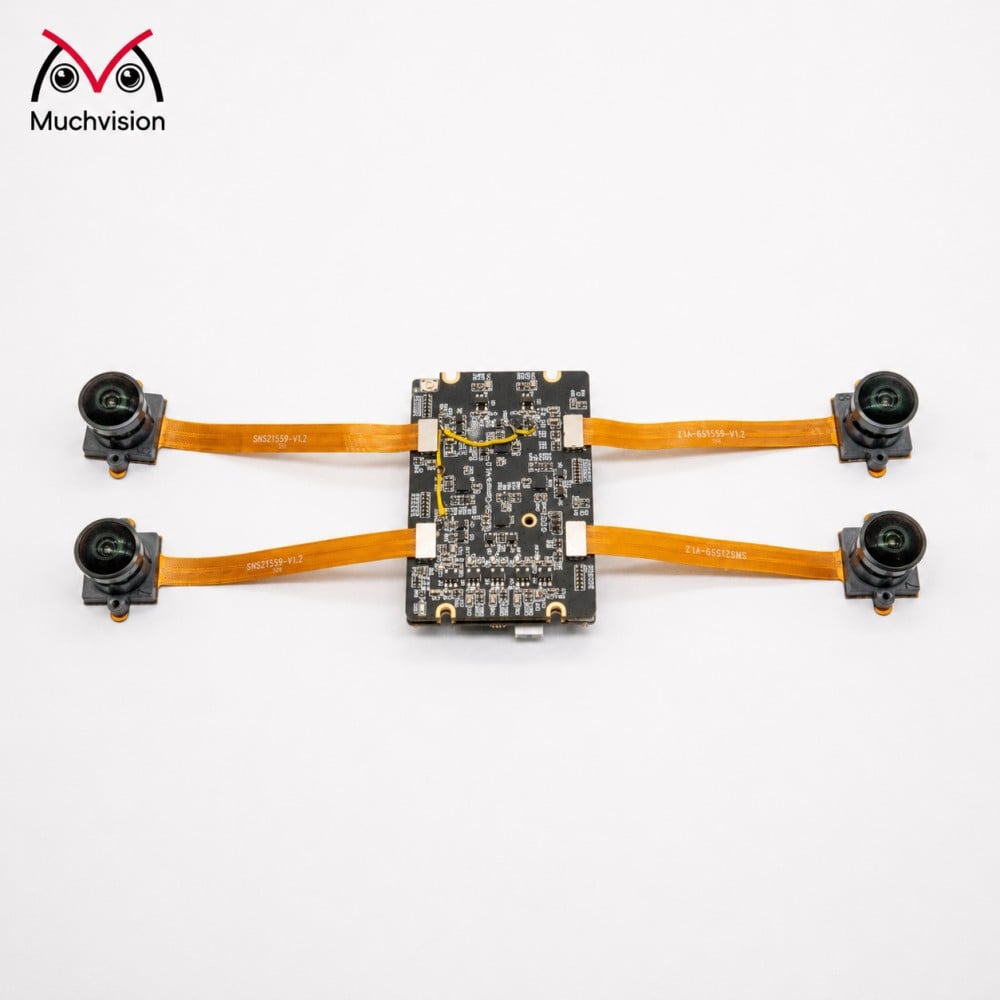
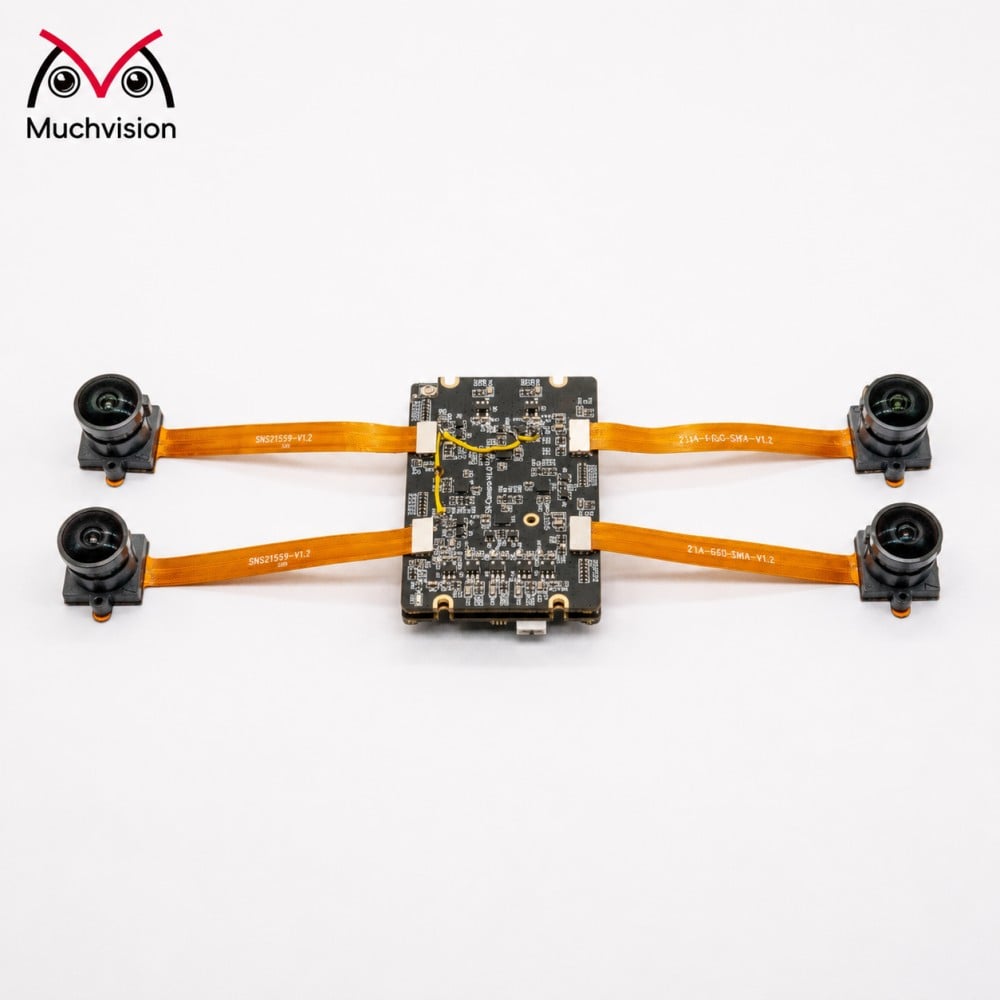
MV11-V1.0 Dette produktet er en firkanalssynkronisert visuell-inertial navigasjonsfusjonsberegningplattform, bygget på den høyytelsesorienterte Rockchip RK3576-prosessen. Den integrerer en høy-nøyaktighets IMU (inertial measurement unit) med fire uavhengige MIPI-kameragrensesnitt. Ved hjelp av en maskinvarebasert synkroniseringsutløsningsmekanisme sikres mikrosekundnøyaktig romlig og tidsmessig justering mellom flerkanalvisuelle bilder og bevegelses- og holdningsdata.
Ved å utnytte RK3576s kraftfulle 8-kjerne heterogene arkitektur og AI-beregningskraft støtter systemet ikke bare parallell behandling av flere HD-videostreams, men kjører også komplekse SLAM-kartleggings-, VIO-lokaliserings- og AI-inferensalgoritmer i sanntid ved kanten. Dette gir et solidt datagrunnlag for nøyaktig oppfatning i dynamiske miljøer.
Produktet har utmerket sensorkompatibilitet og tilpasningsdyktighet til ulike scenarier, og støtter fleksibel valg av ledende høyytelsessensorer for å bygge tilpassede oppfattelsesløsninger. Det er kompatibelt med en rekke sensorer for lavlys- og global lukker, inkludert IMX662, IMX464, OV9281 og AR0234. I kombinasjon med 6-akset holdningskompensasjon fra den integrerte IMU-en sikrer systemet høy-nøyaktig selvlokalisering og miljøoppfatning også under ekstreme forhold, som områder uten GPS-dekning eller kraftige lysendringer. Med de omfattende fordelene «høy regnekraft + flersensorfusjon + maskinvaresynkronisering» styrker dette produktet fremragende felt som Embodied AI, industriell inspeksjon og autonom kjøring. I humanoidrobotapplikasjoner fungerer det som en kjerneoppfattelsesenhet og muliggjør unngåelse av hindringer på millisekundnivå og nøyaktig grep når det kombineres med kameraer med global lukker. For allværsindustriell inspeksjon bruker det stjernelysklasse-sensorer for å sikre visuell sikkerhet under nattoperasjoner. I feltet lavhastighetsautonom kjøring og logistikkfartøyer oppnår det 360°-omgivelsesvisning og høy-nøyaktig navigasjon gjennom visuell fusjon fra flere kameraer. Uansett om det brukes til forskning og utvikling eller kommersiell implementering, er denne plattformen et ideelt valg for å løse komplekse maskinvisionutfordringer.
Bruksområder
Terminalprodukter med visuell funksjonalitet for finans, medier, betalinger, detaljhandel, industriell styring, utdanning, offentlig sektor/bedrifter og helsevesen. Den er egnet for anvendelsesområder som humanoidroboter, smart detaljhandel, panoramakameraer, ubemannet lagerhåndtering, intelligent sortering og levering samt automatiserte UAV-utstyr.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Standardparametere
| Kjerneparametere | |
| CPU | Åttekjerners 64-biters prosessor (4×A72 + 4×A53), med maksimal klokkehastighet på 2,2 GHz |
| GPU | G52 MC3 @ 1 GHz, støtter OpenGL ES 1.1/2.0/3.2, OpenCL 2.0 og Vulkan 1.1 |
| NPU | nPU med beregningsytelse på 6 TOPS, som støtter INT4/INT8/INT16/FP16/BF16/TF32-operasjoner; kan utføre to-kjerne-samarbeid eller virke uavhengig; støtter multitasking og parallell behandling i ulike scenarier |
| Isp | Utstyrt med en innebygd 16-megapiksels ISP som støtter støyreduksjon i mørke miljøer, en RGB-IR-sensor og opptil 120 dB HDR. AI-ISP forbedrer bildekvaliteten ved å redusere støy. |
| minne | LPDDR4/LPDDR4x/LPDDR5 (4 GB/8 GB/16 GB valgfritt) |
| Innebygd lagring | eMMC (16 GB/32 GB/64 GB/128 GB/256 GB valgfritt) |
| Videokoding | Videodekoding: 8K@30 fps/4K@120 fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60 fps (H.264/AVC) Videodekoding: 4K@60 fps (H.265/HEVC, H.264/AVC) Bildedekoding: 4K@60 fps MJPG |
| effekt | DC 5V |
| OS | Støtter RTLinux-kjernen med utmerket sanntidsytelse og brukes mye i industrielle applikasjoner. Støtter Linux-operativsystemet og Buildroot for å gi et trygt og stabilt systemmiljø for produktutvikling og produksjon. Den har nye industrifunksjoner som sanntidsnettverk, Flexbus, maskinvarens ressursisolasjon og DSMC, og oppfyller mangfoldige krav til industrielle applikasjoner. |
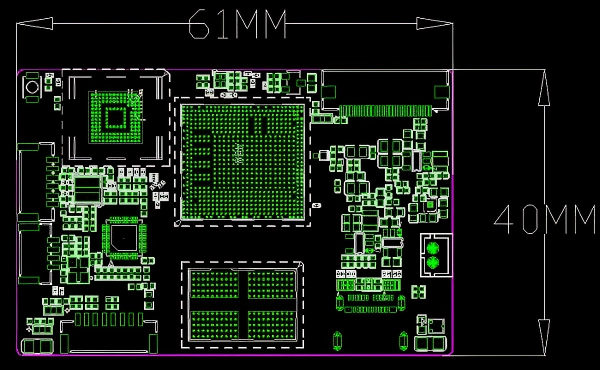
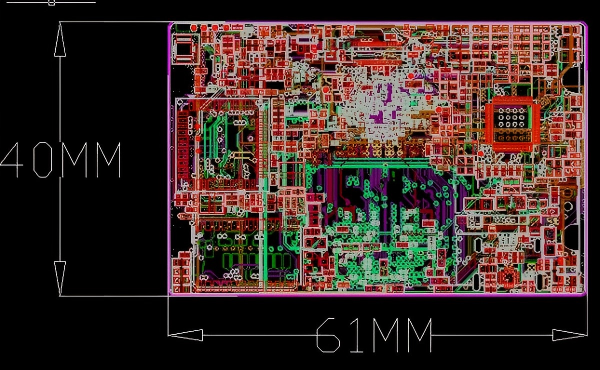
| størrelse | 61 mm × 40 mm × 9 mm |
| Støtter kamera | 4-kanals, 2-spors MIPI-grensesnitt: OV9281, IMX662, AR0234, IM464 osv., støtter tilpassing |
| IMU-gyroskop | 4 gyroskoper i TDK-serien ICM42670 |
| Ethernet | 1 × Gigabit Ethernet-port (tilkoblet via en 8P-1,25 mm Wafer-kontakt) |
| Wi-Fi/PDA | Utstyrt med innebygd Wi-Fi-modul som støtter dualband Wi-Fi 6 (802.11a/b/g/n/ac/ax) ved 2,4 GHz og 5 GHz, samt Bluetooth-støtte. |
| USB | 1 ekstern Type-C USB 3.0-port (støtter ADB) |
| antenne | Rute 1 |
| trykk-knapp | Knapp 1 |
| Andre grensesnitt | 1 UART-kanal, 1 feilsøkingskanal |
Motherboard-størrelse
 |
 |
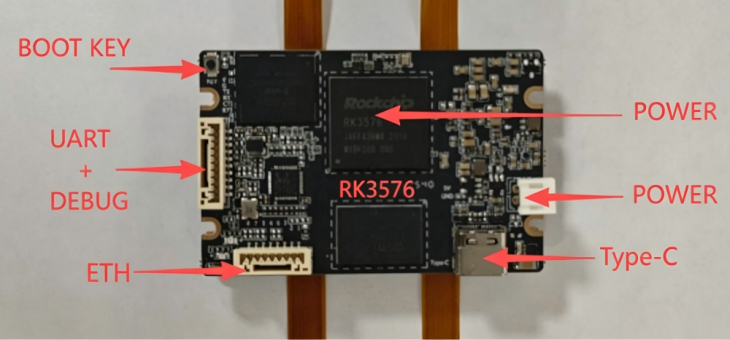
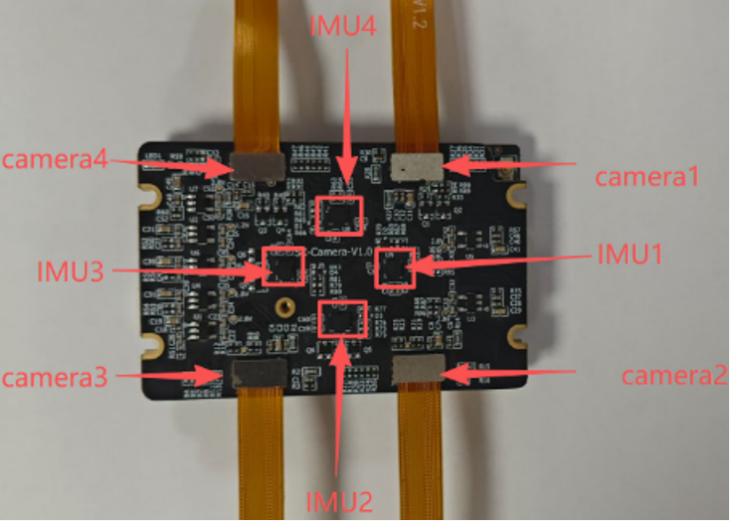
Grensesnittbeskrivelse
 |
 |
Advarsel
Miljøegenskaper
Temperatur
Drift: 0 °C til +40 °C
Lagring: −20 °C til +70 °C
Fuktighet ved lagring
Drift: 10 % til 90 % (ikke-kondenserende)
Lagring: 5 % til 95 % (ikke-kondenserende)
Høyde over havet
Drift: 10 000 fot (maks.)
Lagring: 20 000 fot (maks.)
Høy temperatur og lagring
Testmetode og -betingelser – se beskrivelsen av GB2423.2 «Test Bd og Bb»
Lav temperatur og lagring
Testmetode og -betingelser – se beskrivelsen av GB2423.1 «Test Ad og Ab»
Fuktighet og temperaturtest
Testmetode og -betingelser – se beskrivelsen av GB2423.3 «Test Ca» og GB2423.22 «Test Nb»
Forsiktighetsregler for montering og bruk
Under montering og bruk, vennligst legg merke til og sjekk følgende (men ikke begrenset til) problemområder:



