






Visuaalis-inertiaalinen SLAM-lauta | monikamerainen visuaalis-inertiaalinen navigointi (VIO) – MV11
- Yleiskatsaus
- Suositellut tuotteet
- PCBA- ja elektroniset komponentit ovat erittäin herkkiä staattiselle sähkövaraukselle (ESD). Operaattoreiden on käytettävä ESD-käsivarresta tai -käsineitä ennen piirilevyn käsittelyä tai kokoonpanoa, jotta staattinen sähkö voidaan johtaa pois asianmukaisesti.
- Asennus- ja kiinnitysprosessin aikana vältä emolevyn muodonmuutosta, joka johtuu kiinnityksestä;
- Varmista oikea MIPI-liitännän suunta kameran asennuksen aikana. Tarkista pinnin 1 suunta;
- B2B-liitinosa: Noudata "liitä ensin, kiristä sitten" -järjestystä. Tasaa liittimet ja paina ne kokonaan paikoilleen ennen neljän kulmaluodin kiristämistä. Tämä varmistaa, että liitin kestää värähtelykuormia, kun taas ruuvit tukevat pääasiassa painoa.;
- Asennettaessa lisälaitteita (USB, IO, ETC) kiinnitä huomiota lisälaitteiden IO-tasoihin ja virranottoon;
- Asennettaessa sarjaporttia tarkista, onko RS232- ja TTL-laitteet kytketty suoraan toisiinsa, onko TX- ja RX-yhteydet oikein kytketty ja onko tasot oikeat;
- Onko syöttövirta kytketty virtatulokseen ja täyttääkö syöttövirran jännite, virta jne. vaatimukset perustuen kaikkiin lisälaitteisiin.
Kuvaus
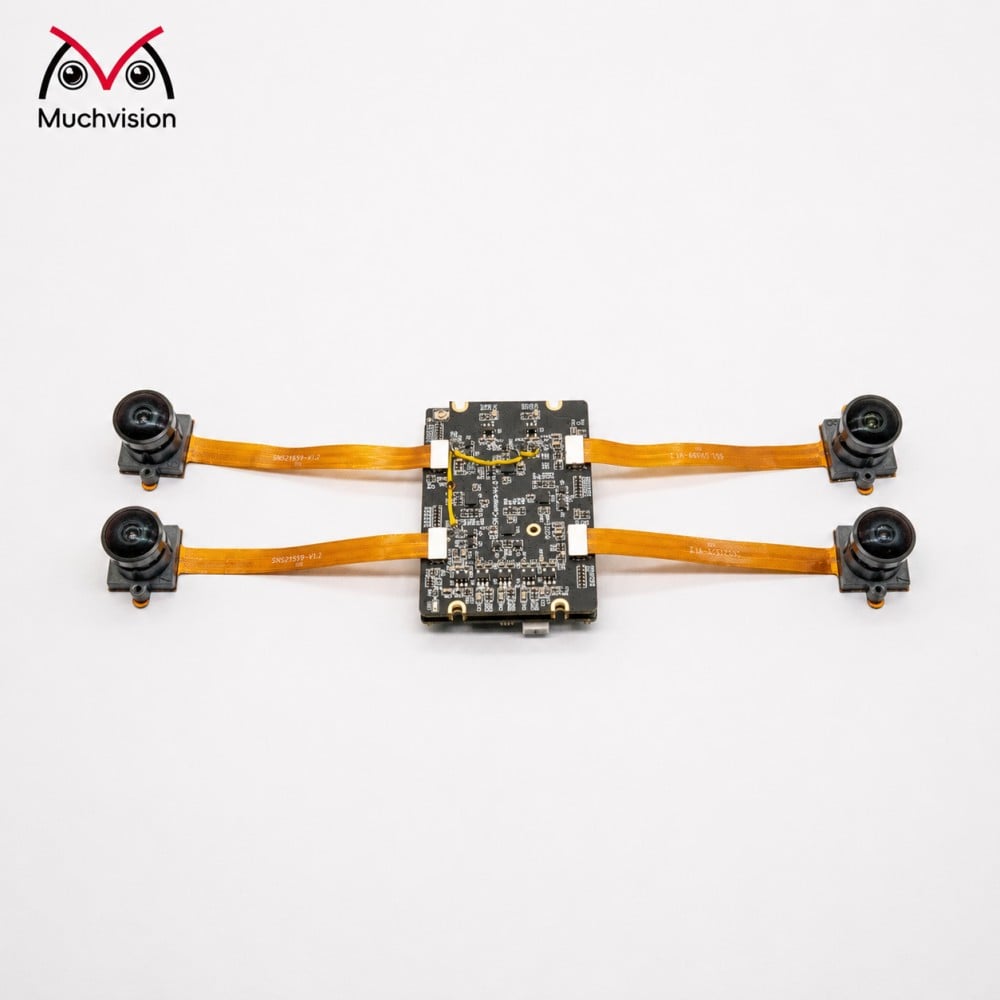
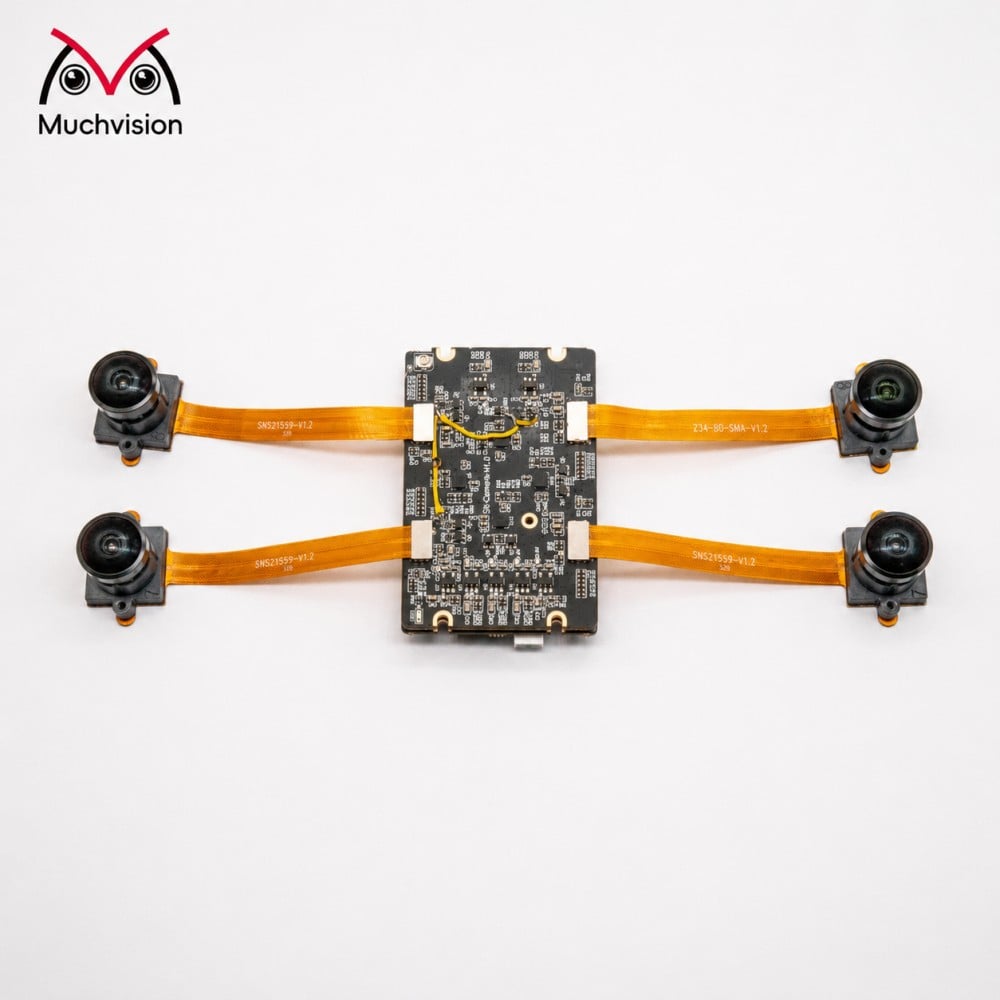
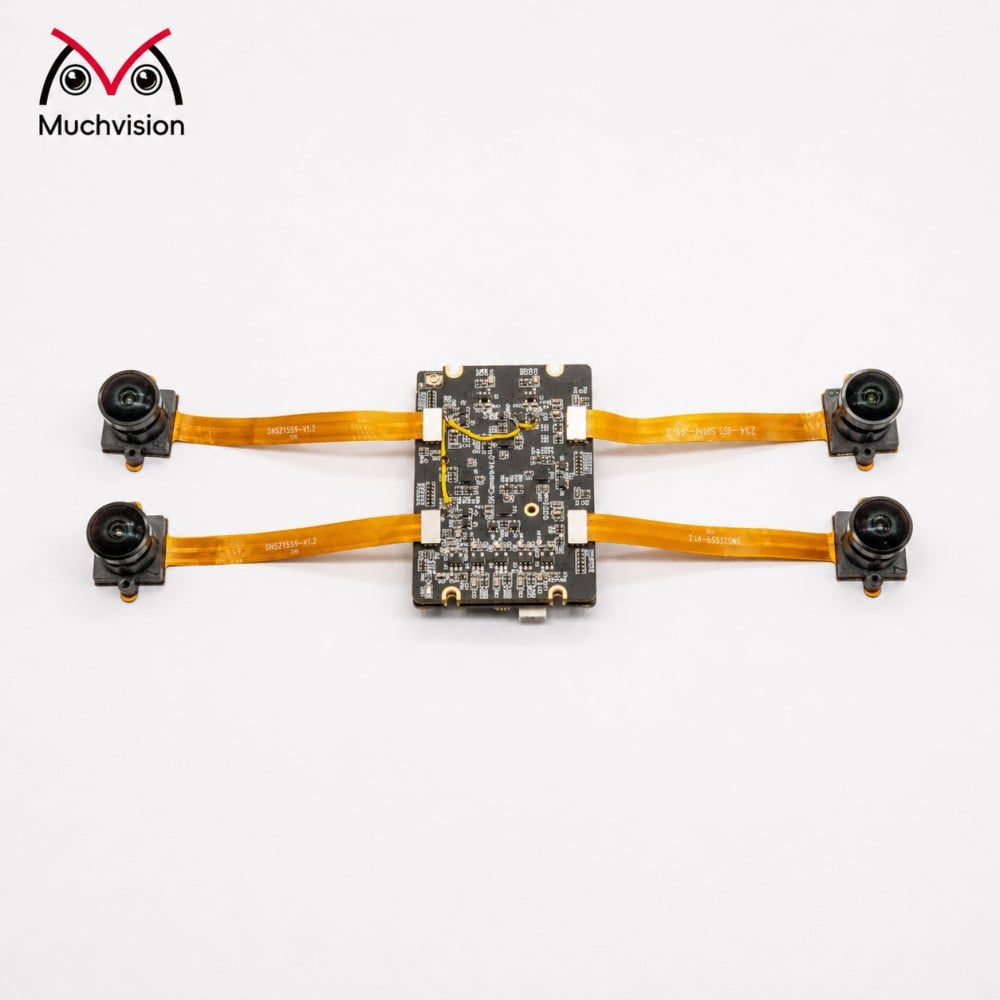
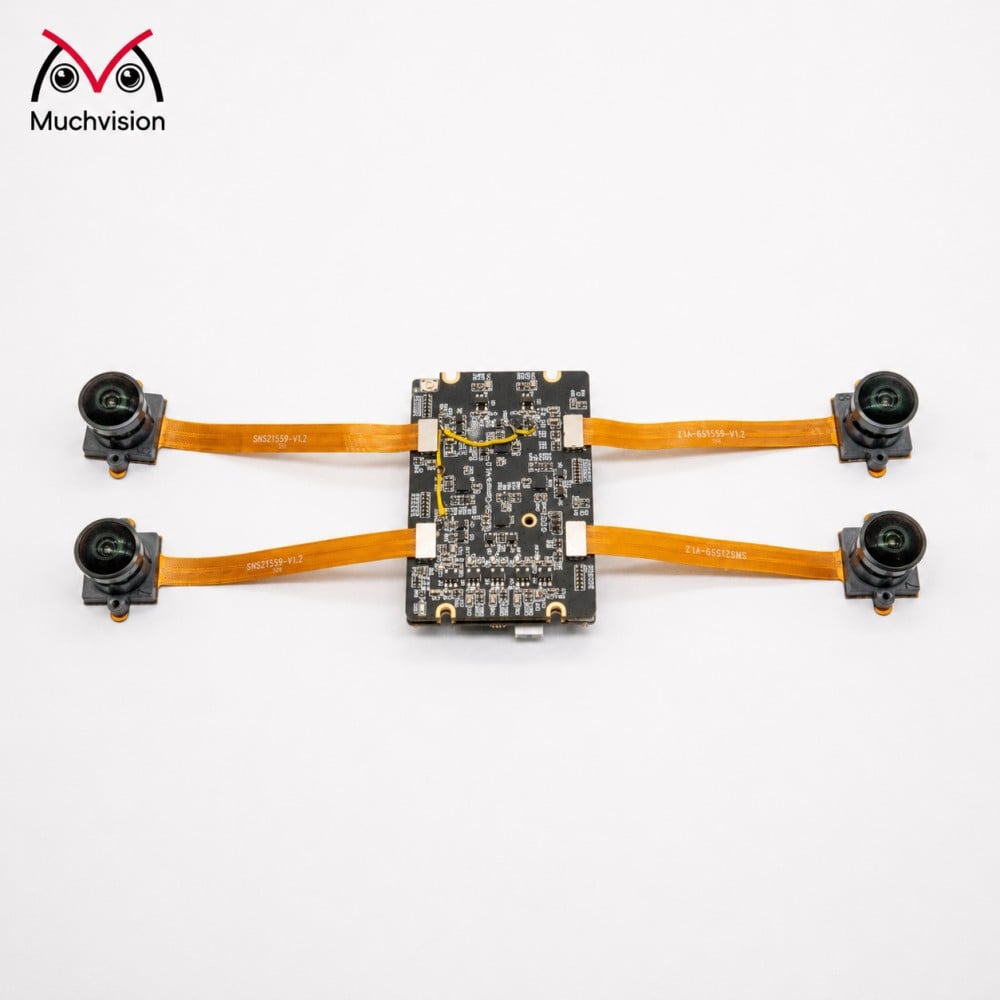
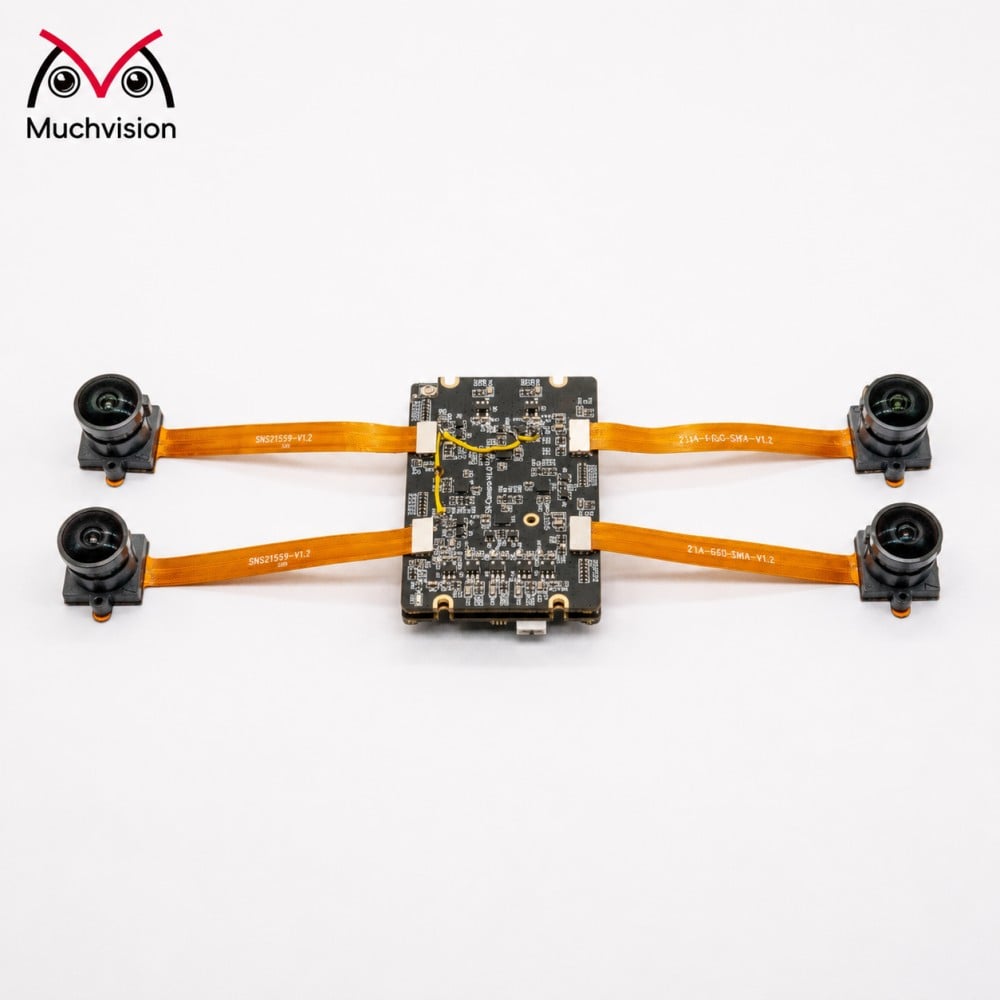
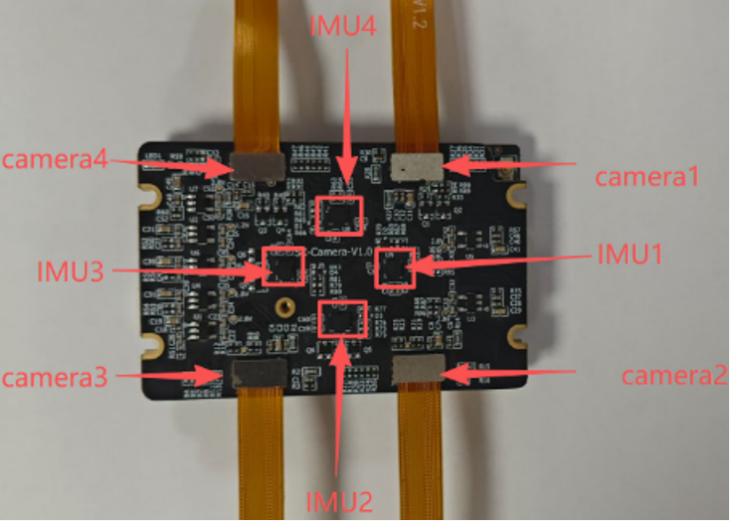
MV11-V1.0 Tämä tuote on nelikanavainen synkronoitu visuaalis-inertiaalinen navigaatiofusio-laskentaplattforma, joka perustuu suorituskykyiseen Rockchip RK3576-prosessoriin. Se sisältää tarkkuus-IMU:n (inertiaalisen mittayksikön) ja neljä riippumatonta MIPI-kameraliitäntää. Laitteellisen synkronointiliipaisimen avulla se varmistaa mikrosekuntitason aika-avaruudellisen täsmäytyksen monikanavaisten kuvien ja liike-asentoaineistojen välillä.
Hyödyntäen RK3576-prosessorin voimakasta 8-ytimistä heterogeenistä arkkitehtuuria ja tekoälylaskentakykyä järjestelmä tukee ei ainoastaan useiden HD-videovirtojen rinnakkaiskäsittelyä, vaan myös monimutkaisten SLAM-kartoitus-, VIO-paikannus- ja tekoälypäättelyalgoritmien reaaliaikaista suoritusta reunaverkossa. Tämä tarjoaa vankan dataperustan tarkalle havainnoinnille dynaamisissa ympäristöissä.
Tuotteen erinomainen anturiyhteensopivuus ja sopeutumiskyky erilaisiin tilanteisiin mahdollistaa joustavan valinnan nykyaikaisista korkean suorituskyvyn antureista, jotta voidaan rakentaa mukautettuja havaintoratkaisuja. Tuote on yhteensopiva useiden heikossa valaistuksessa toimivien ja globaalin suljimen omaavien antureiden kanssa, kuten IMX662-, IMX464-, OV9281- ja AR0234-antureiden kanssa. Kanssisijaisen IMU:n tarjoaman kuusiaxisisen asennonkorjauksen avulla järjestelmä säilyttää korkean tarkkuuden omaa sijaintiaan määrittävän ja ympäristöä havainnoivan kyvyn myös äärimmäisissä olosuhteissa, kuten GPS:n puuttuessa tai valaistuksen voimakkaissa muutoksissa. "Korkea laskentateho + monianturifusio + laitteistosynkronointi" -ominaisuuksien kokonaisvaikutus tekee tuotteesta laajalti käytettävän ratkaisun uusimman teknologian alueilla, kuten ruumiillisessa tekoälyssä, teollisessa tarkastuksessa ja itseohjautuvassa ajossa. Ihmismaisissa robottisovelluksissa tuote toimii keskitettynä havaintoyksikkönä ja mahdollistaa millisekunnin tarkkuudella esteiden välttämisen ja tarkan ottelemisen yhdessä globaalin suljimen omaavien kameroiden kanssa. Kaiken säällä tehtävään teolliseen tarkastukseen tuote hyödyntää tähtivalo-luokan antureita varmistaakseen näköperusteisen turvallisuuden yöllä. Alhaisen nopeuden itseohjautuvassa ajossa ja logistiikkakuljetuksissa tuote saavuttaa 360-asteisen ympäristönäkymän ja korkean tarkkuuden navigoinnin monikamerahavaintofusion avulla. Tämä alusta onkin sekä tutkimus- ja kehitystyöhön että kaupalliselle käyttöönotolle ideaali ratkaisu monimutkaisten koneen näköongelmien ratkaisemiseen.
Sovellusskenaariot
Visuaalisesti kyvykkäitä pääteprodukteja rahoitus-, media-, maksu-, vähittäiskauppa-, teollisuusohjaus-, koulutus-, hallinto/yritys- ja terveydenhuoltoalalla. Tuotteita voidaan käyttää esimerkiksi ihmismäisissä robotteissa, älykkäässä vähittäiskaupassa, panoraamakamerassa, autonomaarisessa varastossa, älykkäässä lajittelussa ja toimituksessa sekä automatisoiduissa UAV-laitteissa.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Perusparametrit
| Ydinparametrit | |
| CPU | Kahdeksan-ydininen 64-bittinen prosessori (4×A72 + 4×A53), jossa enimmillään 2,2 GHz:n kellotaajuus |
| GPU | G52 MC3 @ 1 GHz, tukee OpenGL ES 1.1/2.0/3.2, OpenCL 2.0 ja Vulkan 1.1 -standardia |
| NPU:n | 6 TOPS:n laskentatehoisen NPU:n kyky, joka tukee INT4/INT8/INT16/FP16/BF16/TF32 -operaatioita; kykenee kaksiytimiseen yhteistyöhön tai itsenäiseen toimintaan; tukee monitehtävyyttä ja rinnakkaiskäsittelyä eri skenaarioissa |
| Isp | Varustettu 16 megapikselin sisäänrakennetulla ISP:llä, joka tukee heikossa valossa tapahtuvaa kohinanpoistoa, RGB-IR-anturia ja jopa 120 dB:n HDR:tä. AI-ISP parantaa kuvalaatua vähentäen kohinaa. |
| muisti | LPDDR4/LPDDR4x/LPDDR5 (4 GB/8 GB/16 GB valinnaisia) |
| Sisäinen tallennus | eMMC (16 GB/32 GB/64 GB/128 GB/256 GB valinnaisia) |
| Videokoodaus | Videopurku: 8K@30 fps / 4K@120 fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60 fps (H.264/AVC) Videopurku: 4K@60 fps (H.265/HEVC, H.264/AVC) Kuvien purku: 4K@60 fps MJPG |
| teho | DC 5V |
| Käyttöjärjestelmä | Tukee RTLinux-ydintä erinomaisella reaaliaikasuorituskyvyllä, jota käytetään laajalti teollisuussovelluksissa. Tukee Linux-käyttöjärjestelmää ja Buildrootia turvallisemman ja vakaita järjestelmäympäristön tarjoamiseksi tuotekehitykseen ja tuotantoon. Tuote sisältää uusia teollisia ominaisuuksia, kuten reaaliaikaista verkkojen käyttöä, Flexbus-rajapintaa, laitteistoresurssien eristämistä ja DSMC:tä, jotta voidaan täyttää moninaiset teollisuussovellusten vaatimukset. |
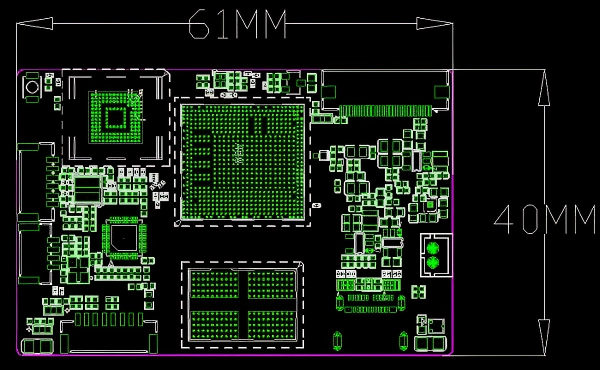
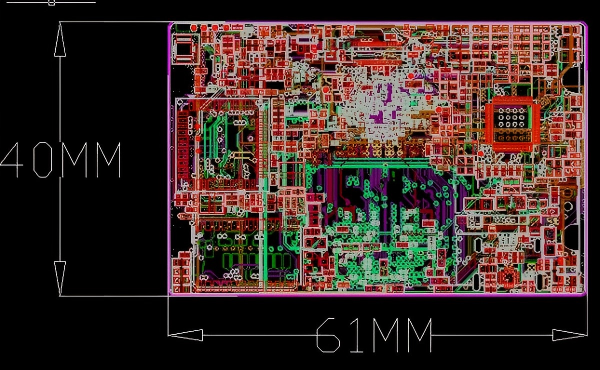
| koko | 61 mm × 40 mm × 9 mm |
| Tukee kameraa | 4-kanavainen, 2-linjan MIPI-liitäntä: OV9281, IMX662, AR0234, IM464 jne., mukautettavissa |
| IMU-tyyppinen gyroskooppi | 4 kpl TDK:n sarjan ICM42670-gyroskooppeja |
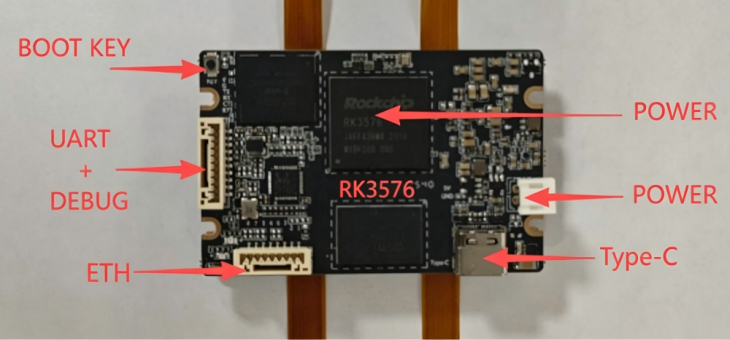
| Ethernet | 1 kpl Gigabit-Ethernet-portti (liitetty 8-pinnaisen, 1,25 mm välimatkan Wafer-liittimen kautta) |
| WiFi/PDA | Varustettu sisäänrakennetulla WiFi-moduulilla, joka tukee kaksitaajuusista WiFi 6 -tekniikkaa (802.11a/b/g/n/ac/ax) taajuuksilla 2,4 GHz ja 5 GHz sekä Bluetoothia. |
| USB | 1 kpl ulkoinen Type-C USB 3.0 -portti (tukee ADB:tä) |
| antenni | Reitti 1 |
| painikkeella | Nappi 1 |
| Muut liitännät | 1 kpl UART-kanava, 1 kpl virheenkorjauskanava |
Emolevyn koko
 |
 |
Liitäntäkuvaus
 |
 |
Varotoimet
Ympäristöominaisuudet
Lämpötila
Käyttölämpötila: 0 °C – +40 °C
Varastointilämpötila: -20 °C – +70 °C
Ilmankosteus (varastointi)
Käyttöilmankosteus: 10–90 % (ei kastumista)
Varastointi-ilman kosteus: 5–95 % (ei kastumista)
Korkeus
Käyttökorkeus: enintään 10 000 jalkaa
Varastointikorkeus: enintään 20 000 jalkaa
Korkea lämpötila ja varastointi
Testimenetelmä ja -olosuhteet ks. GB2423.2-standardin kuvaus "Testi Bd ja Bb"
Alhainen lämpötila ja varastointi
Testimenetelmä ja -olosuhteet: katso GB2423.1:n kuvaus "Testi Ad ja Ab"
Kosteus- ja lämpötilatesti
Testimenetelmä ja -olosuhteet: katso GB2423.3:n kuvaus "Testi Ca" ja GB2423.22:n kuvaus "Testi Nb"
Varotoimet kokoonpanon ja käytön aikana
Kokoonpanon ja käytön aikana kiinnitä huomiota ja tarkista seuraavat (muun muassa) ongelmapisteet:



