






- Översikt
- Rekommenderade produkter
- PCBA och elektroniska komponenter är mycket känsliga för statisk elektricitet (ESD). Operatörer måste bära ESD-handlindar eller handskar innan de hanterar kort eller monterar dem, för att säkerställa korrekt avledning av statisk elektricitet.
- Undvik deformation av moderkortet under installations- och fästprocessen orsakad av fästningsmetoden.
- Se till att MIPI-gränssnittet är korrekt justerat vid kamerainstallation. Kontrollera riktningen för pinne 1.
- B2B-kontaktmontering: Följ sekvensen "koppla först, skruva sedan". Justera och tryck ihop kontaktorna för att säkerställa fullständig koppling innan de fyra hörnskruvarna åtdrags. Detta säkerställer att kontakten kan hantera vibrationspåverkan, medan skruvarna främst stödjer vikten.
- Vid installation av perifera enheter (USB, IO, etc.) ska du ta hänsyn till perifera IO-nivåer och strömutgående problem;
- Vid installation av serienporten ska du kontrollera om RS232- och TTL-enheter är direktanslutna, om TX- och RX-anslutningsmetoderna är korrekta och om nivån är korrekt;
- Om ingående ström är ansluten till ströminmatningsgränssnittet och om ingående strömspännings-, ström- och andra krav uppfylls enligt de totala perifera enheterna.
Beskrivning
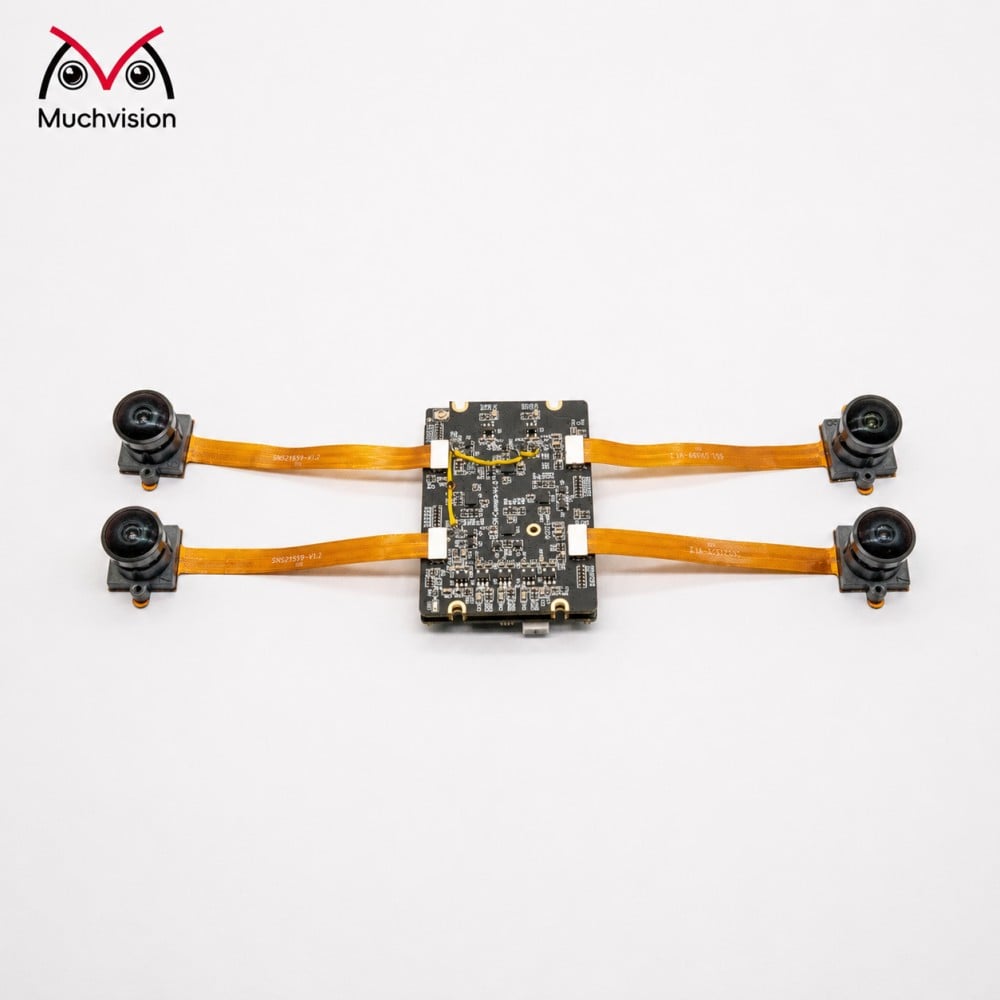
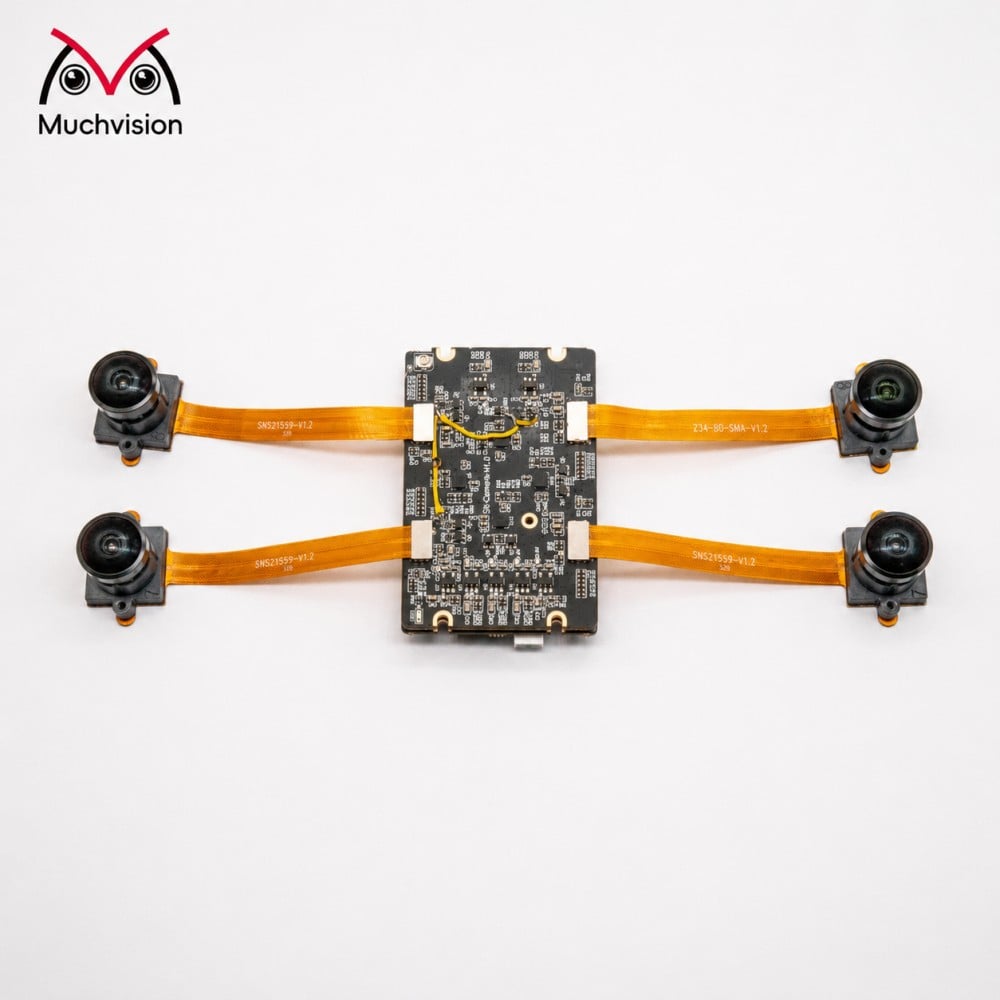
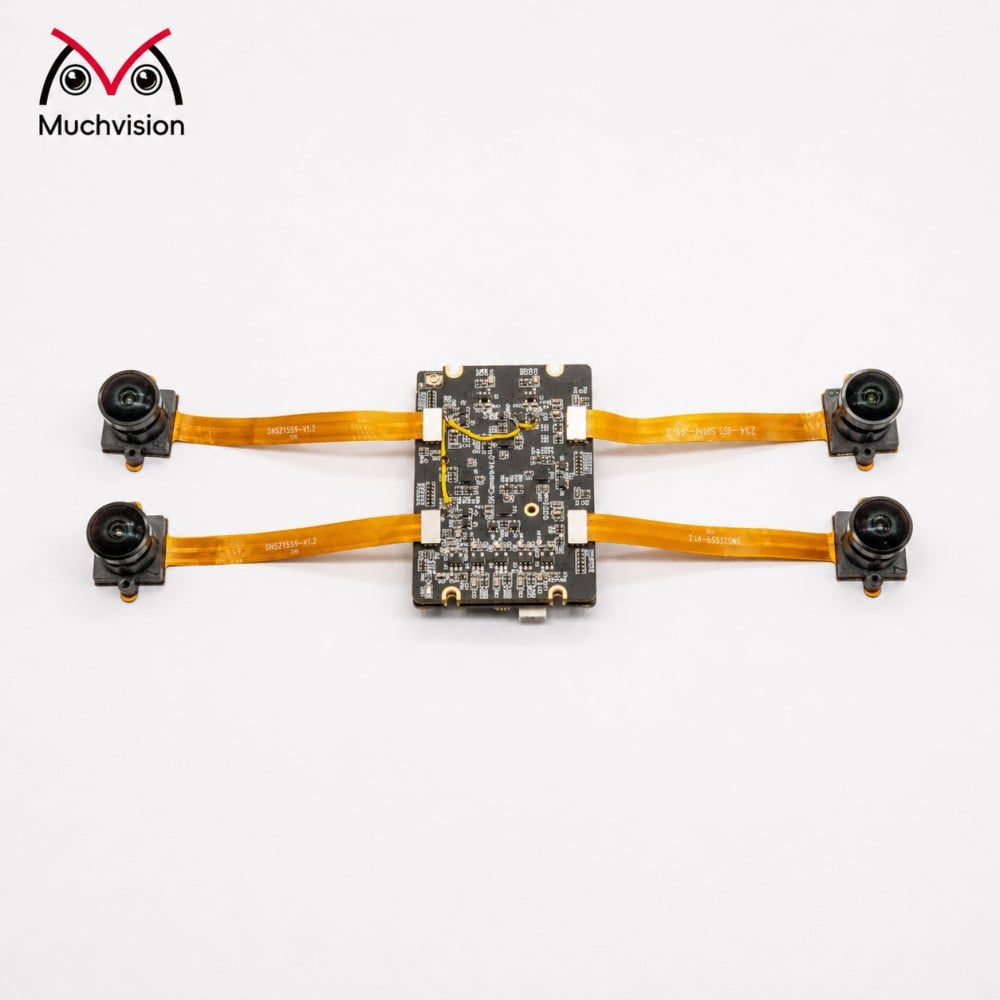
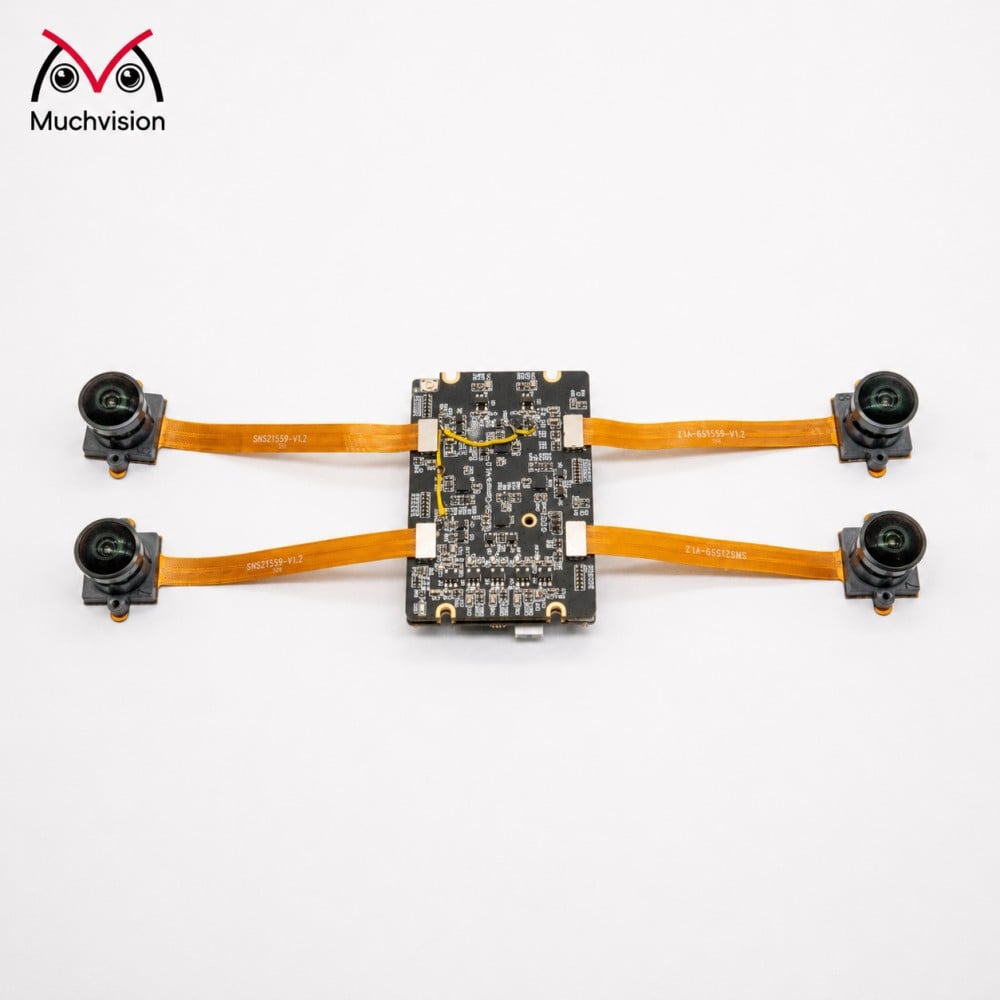
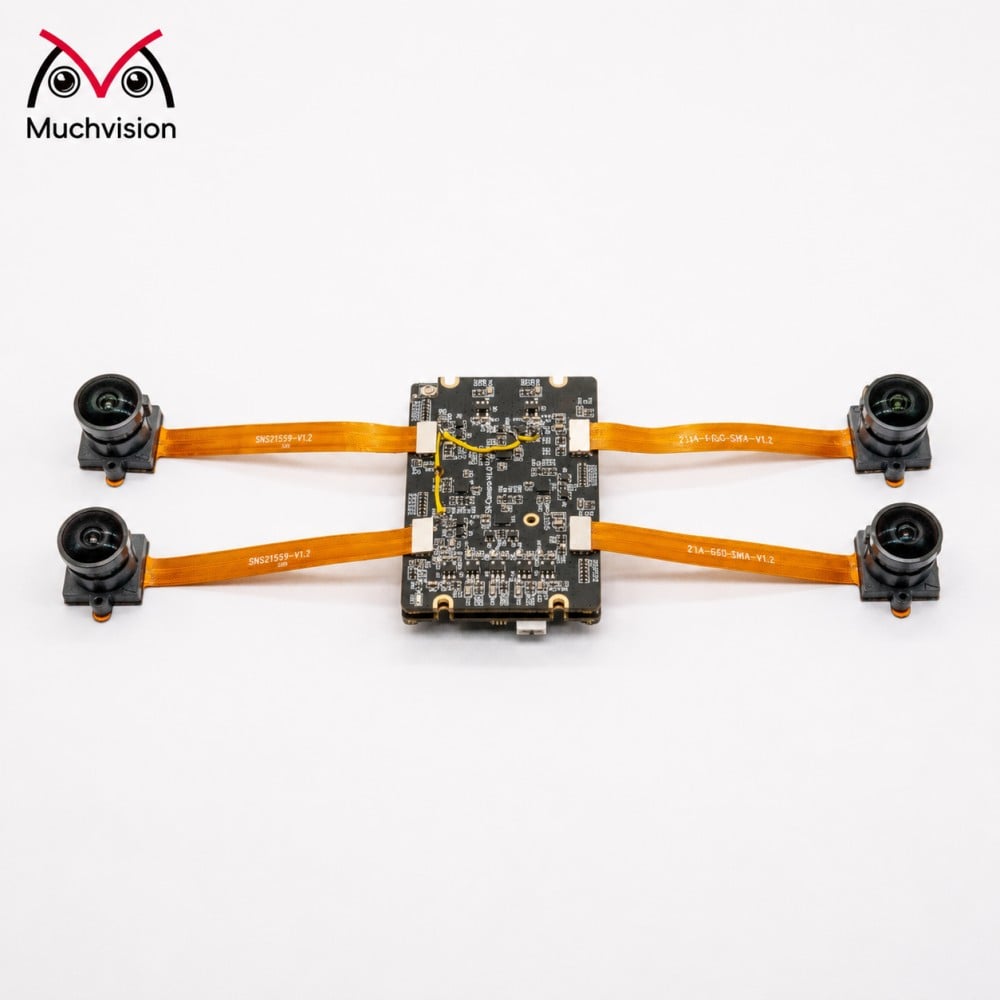
MV11-V1.0 Denna produkt är en fyrkanalig synkroniserad visuell-inertial navigationsfusionsberäkningsplattform, byggd på den högpresterande Rockchip RK3576-processorn. Den integrerar en högprecisionens IMU (Inertial Measurement Unit) med fyra oberoende MIPI-kameragränssnitt. Genom en hårdvarusynkroniserad utlösarmekanism säkerställs mikrosekundnivåns rumlig och tidsmässig justering mellan flerkanaliga visuella bilder och rörelse- och lägesdata.
Genom att utnyttja RK3576:s kraftfulla 8-kärniga heterogena arkitektur och AI-beräkningskapacitet stöder systemet inte bara parallellbearbetning av flera HD-videostreamar, utan kör också komplexa SLAM-mappnings-, VIO-lokalisations- och AI-inferensalgoritmer i realtid vid kanten. Detta ger en solid datagrund för exakt uppfattning i dynamiska miljöer.
Produkten har exceptionell kompatibilitet med sensorer och anpassningsförmåga till olika scenarier, vilket stödjer flexibel val av ledande högpresterande sensorer för att bygga anpassade uppfattningssystem. Den är kompatibel med en mängd sensorer för lågt ljus och globala slutters (global shutter), inklusive IMX662, IMX464, OV9281 och AR0234. Tillsammans med den 6-axliga lägeskompensationen som tillhandahålls av den inbyggda IMU:n bibehåller systemet högprecision i självlokalisering och miljöuppfattning även i extrema förhållanden, såsom GPS-fria miljöer eller kraftiga förändringar i belysningen. Med de omfattande fördelarna med "hög beräkningskapacitet + flersensorfusion + hårdvarusynkronisering" stärker denna produkt banbrytande områden såsom Embodied AI, industriell inspektion och autonom körning. I humanoidrobotapplikationer fungerar den som en kärnkomponent för uppfattning och möjliggör undvikning av hinder på millisekundnivå och exakt greppning när den kombineras med kameror med globala slutters. För industriell inspektion under alla väderförhållanden använder den stjärnljusklassens sensorer för att säkerställa visuell säkerhet under nattverksamhet. Inom området för låghastighetsautonom körning och logistikfordon uppnår den 360°-översikt och högprecision i navigation genom visuell fusion av flera kameror. Oavsett om det gäller forskning och utveckling eller kommersiell distribution är denna plattform ett idealiskt val för att lösa komplexa utmaningar inom maskinvision.
Tillämpningsscenarier
Visuellt aktiverade terminalprodukter för finans, media, betalning, detaljhandel, industriell styrning, utbildning, offentlig sektor/enterprise och vård. Den är lämplig för tillämpningsområden såsom humanoida robotar, smart detaljhandel, panoramakameror, obemannade lager, intelligent sortering och leverans samt automatiserad UAV-utrustning.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Standardparametrar
| Kärnparametrar | |
| CPU | Åtta kärnor, 64-bitars processor (4×A72 + 4×A53), med en maximal klockfrekvens på 2,2 GHz |
| GPU | G52 MC3 @ 1 GHz, stödjer OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | beräkningskraft på 6 TOPS från NPU, stödjer operationer i INT4/INT8/INT16/FP16/BF16/TF32; kan utföra dubbelkärnsamarbete eller fungera oberoende; stödjer multitasking och parallell bearbetning i olika scenarier |
| Isp | Utrustad med en inbyggd 16-megapixel ISP som stödjer brusreducering vid låg belysning, en RGB-IR-sensor och upp till 120 dB HDR. AI-ISP förbättrar bildkvaliteten genom minskat brus. |
| minne | LPDDR4/LPDDR4x/LPDDR5 (4 GB/8 GB/16 GB valfritt) |
| Inbyggt lagringsutrymme | eMMC (16 GB/32 GB/64 GB/128 GB/256 GB valfritt) |
| Videokodning | Videodekodning: 8K@30 fps/4K@120 fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60 fps (H.264/AVC) Videodekodning: 4K@60 fps (H.265/HEVC, H.264/AVC) Bilddekodning: 4K@60 fps MJPG |
| ström | DC 5V |
| OS | Stöd för RTLinux-kärnan med utmärkt realtidsprestanda, brett använt i industriella applikationer. Stöd för Linux-operativsystemet och Buildroot för att tillhandahålla en säker och stabil systemmiljö för produktutveckling och produktion. Den erbjuder nya industriella funktioner såsom realtidsnätverk, Flexbus, hårdvaruresursisolering och DSMC, vilket möter många olika krav från industriella applikationer. |
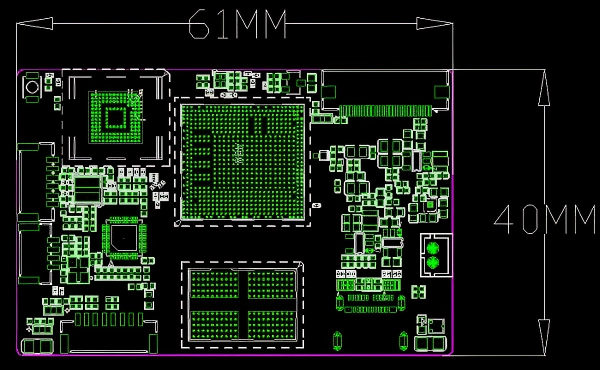
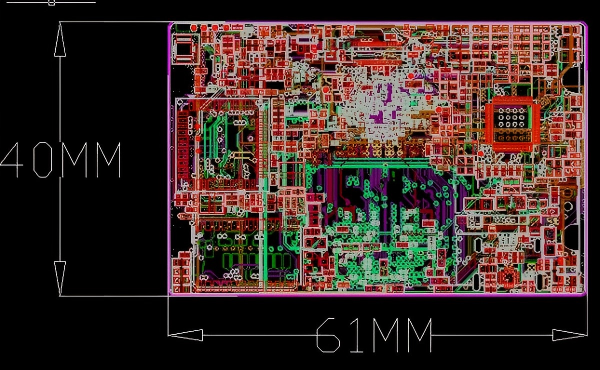
| storlek | 61 mm × 40 mm × 9 mm |
| Stödkamera | 4 kanaler, 2-linje MIPI-gränssnitt: OV9281, IMX662, AR0234, IM464, etc., stöd för anpassning |
| IMU-gyroskop | 4 gyroskop av TDK-serien ICM42670 |
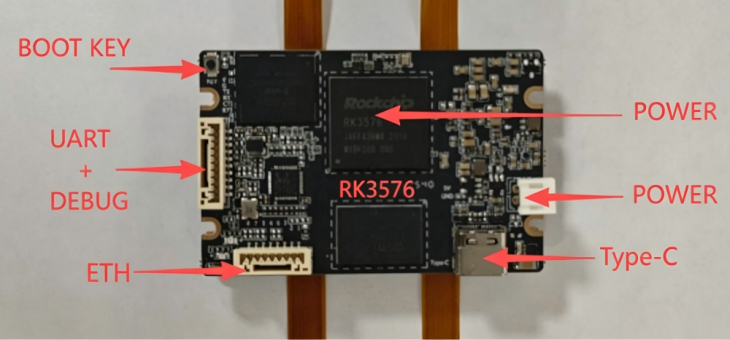
| Ethernet | 1 × Gigabit Ethernet-port (ansluten via en 8P-1,25 mm Wafer-uttag) |
| Wifi/PDA | Utrustad med en inbyggd WiFi-modul som stödjer dualband-WiFi 6 (802.11a/b/g/n/ac/ax) på 2,4 GHz och 5 GHz, samt Bluetooth-stöd. |
| USB | 1 extern USB 3.0 Type-C-port (stödjer ADB) |
| antenn | Rutt 1 |
| tryckknapp | Knapp 1 |
| Övriga gränssnitt | 1 UART-kanal, 1 felsökningskanal |
Moderkortsstorlek
 |
 |
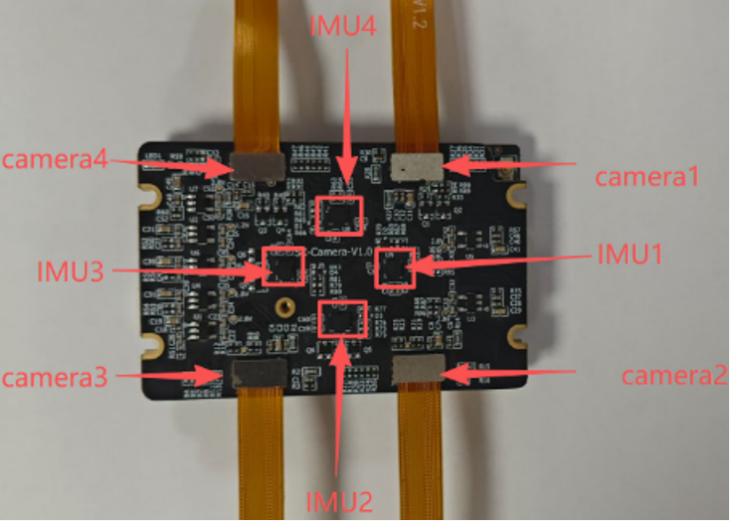
Gränssnittsbeskrivning
 |
 |
Försiktighetsåtgärder
Miljöegenskaper
Temperatur
Drifttemperatur: 0 °C till +40 °C
Förvaring: -20 °C till +70 °C
Luftfuktighet vid förvaring
Drift: 10–90 % (utan kondensering)
Förvaring: 5–95 % (utan kondensering)
Höjd över havet
Drift: 10 000 fot (max)
Förvaring: 20 000 fot (max)
Hög temperatur och förvaring
Testmetod och -villkor, se beskrivningen i GB2423.2 "Test Bd och Bb"
Låg temperatur och förvaring
Testmetod och -villkor, se beskrivningen i GB2423.1 "Test Ad och Ab"
Fuktighets- och temperaturtest
Testmetod och -villkor, se beskrivningen i GB2423.3 "Test Ca" och GB2423.22 "Test Nb"
Försiktighetsåtgärder vid montering och användning
Under montering och användning ska följande (men inte begränsat till dessa) problemområden observeras och kontrolleras:



