






- ภาพรวม
- ผลิตภัณฑ์ที่แนะนำ
- PCBA และชิ้นส่วนอิเล็กทรอนิกส์มีความไวต่อไฟฟ้าสถิตย์ (ESD) สูงมาก ผู้ปฏิบัติงานจำเป็นต้องสวมสายรัดข้อมือป้องกันไฟฟ้าสถิตย์หรือถุงมือป้องกันไฟฟ้าสถิตย์ก่อนจัดการกับแผงวงจรหรือการประกอบ เพื่อให้มั่นใจว่าสามารถปล่อยประจุไฟฟ้าสถิตย์ได้อย่างเหมาะสม
- ระหว่างกระบวนการติดตั้งและยึดตรึง หลีกเลี่ยงการโก่งตัวของเมนบอร์ดที่เกิดจากสาเหตุการยึดตรึง
- ตรวจสอบให้แน่ใจว่าอินเทอร์เฟซ MIPI จัดเรียงอย่างถูกต้องขณะติดตั้งกล้อง พร้อมยืนยันทิศทางของขาที่ 1
- ชุดขั้วต่อแบบ B2B: ปฏิบัติตามลำดับ "เชื่อมต่อก่อน แล้วจึงขันสกรูทีหลัง" โดยจัดแนวและกดขั้วต่อให้เข้ากันอย่างสมบูรณ์ก่อน จากนั้นจึงขันสกรูที่มุมทั้งสี่มุม วิธีนี้จะช่วยให้ขั้วต่อสามารถรับแรงสั่นสะเทือนได้อย่างมีประสิทธิภาพ ในขณะที่สกรูทำหน้าที่รองรับน้ำหนักเป็นหลัก
- เมื่อติดตั้งอุปกรณ์เสริม (USB, IO, ETC) โปรดใส่ใจกับระดับสัญญาณไอโอของอุปกรณ์เสริมและปัญหาการจ่ายกระแสไฟฟ้า
- เมื่อติดตั้งพอร์ตซีเรียล โปรดตรวจสอบว่าอุปกรณ์ RS232 และ TTL เชื่อมต่อกันโดยตรงหรือไม่ วิธีการเชื่อมต่อสาย TX และ RX ถูกต้องหรือไม่ และระดับสัญญาณเหมาะสมหรือไม่
- ตรวจสอบว่าแหล่งจ่ายไฟขาเข้าได้เชื่อมต่อกับขั้วต่อจ่ายไฟขาเข้าแล้วหรือไม่ และตรวจสอบว่าแรงดันไฟฟ้า กระแสไฟฟ้า ฯลฯ ของแหล่งจ่ายไฟขาเข้าสอดคล้องกับข้อกำหนดตามจำนวนอุปกรณ์เสริมทั้งหมดหรือไม่
คำอธิบาย
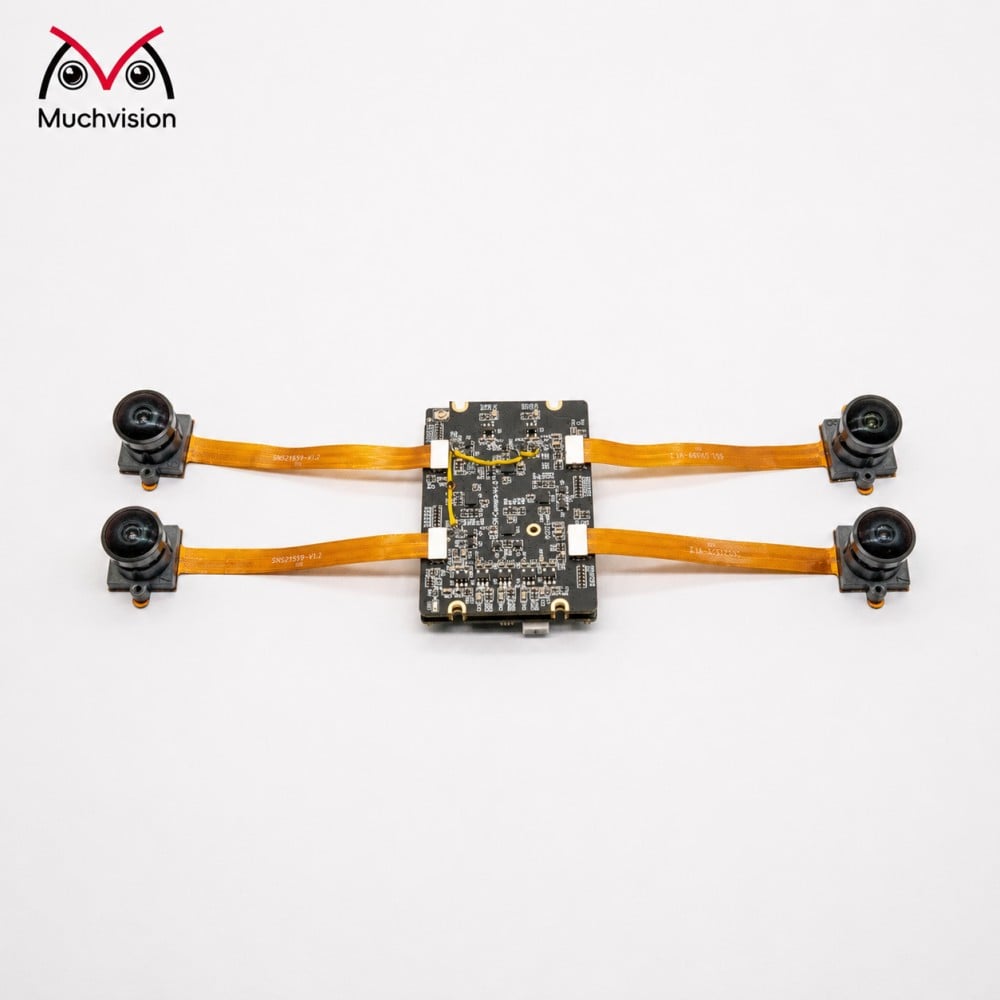
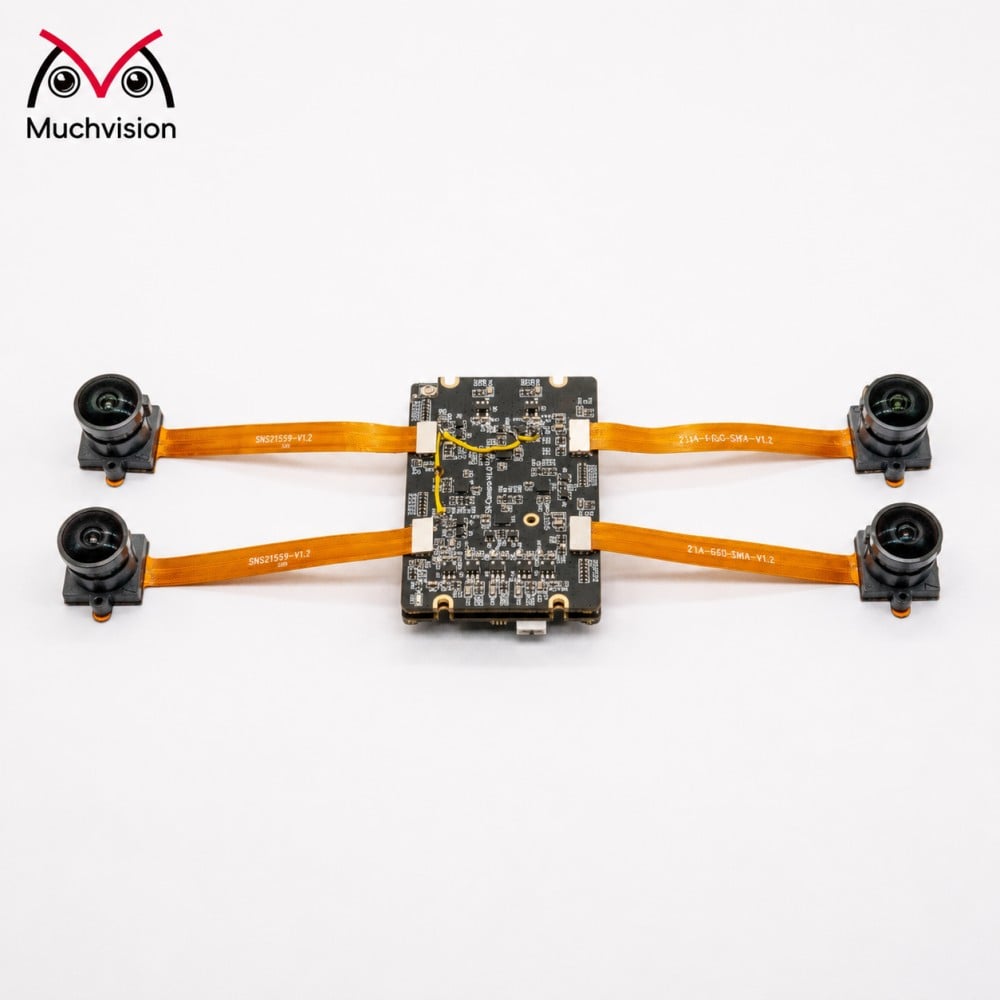
MV11-V1.0 ผลิตภัณฑ์นี้เป็นแพลตฟอร์มการประมวลผลแบบผสานการนำทางด้วยภาพและแรงเฉื่อยแบบซิงโครไนซ์ 4 ช่องสัญญาณ ที่พัฒนาบนโปรเซสเซอร์ Rockchip RK3576 ที่มีประสิทธิภาพสูง ซึ่งรวมหน่วยวัดแรงเฉื่อยความแม่นยำสูง (IMU: Inertial Measurement Unit) เข้ากับอินเทอร์เฟซกล้อง MIPI จำนวน 4 ช่องที่แยกจากกันอย่างอิสระ โดยใช้กลไกการกระตุ้นแบบซิงโครไนซ์ในระดับฮาร์ดแวร์ เพื่อให้มั่นใจว่าข้อมูลภาพจากหลายช่องสัญญาณและข้อมูลท่าทางการเคลื่อนที่จะมีการจัดเรียงเชิงพื้นที่และเวลาที่สอดคล้องกันในระดับไมโครวินาที
ด้วยสถาปัตยกรรมแบบฮีเทอโรเจเนียส 8 คอร์และพลังการประมวลผลปัญญาประดิษฐ์ (AI) ที่ทรงพลังของ RK3576 ระบบดังกล่าวไม่เพียงรองรับการประมวลผลสตรีมวิดีโอความละเอียดสูงหลายสตรีมแบบขนาน แต่ยังสามารถรันอัลกอริธึมการสร้างแผนที่ SLAM การระบุตำแหน่งด้วย VIO และการอนุมานด้วย AI ได้แบบเรียลไทม์ที่ขอบเครือข่าย (edge) อีกด้วย ซึ่งมอบพื้นฐานข้อมูลที่มั่นคงสำหรับการรับรู้อย่างแม่นยำในสภาพแวดล้อมที่เปลี่ยนแปลงอยู่ตลอดเวลา
ผลิตภัณฑ์นี้มีคุณสมบัติโดดเด่นด้านความเข้ากันได้กับเซ็นเซอร์และสามารถปรับตัวให้เหมาะสมกับสถานการณ์ต่าง ๆ ได้อย่างยืดหยุ่น โดยรองรับการเลือกใช้เซ็นเซอร์ประสิทธิภาพสูงที่เป็นที่นิยมในตลาด เพื่อสร้างโซลูชันการรับรู้ที่ออกแบบเฉพาะตามความต้องการ มีความเข้ากันได้กับเซ็นเซอร์แบบแสงน้อย (low-light) และเซ็นเซอร์แบบกล้องชัตเตอร์โลก (global shutter) หลากหลายชนิด รวมถึง IMX662, IMX464, OV9281 และ AR0234 เมื่อผสานกับระบบชดเชยท่าทาง 6 แกน (6-axis attitude compensation) ที่ให้โดยหน่วยวัดแนวโน้มภายในตัว (IMU) ระบบจึงสามารถรักษาความสามารถในการระบุตำแหน่งตนเอง (self-localization) และการรับรู้สภาพแวดล้อมได้อย่างแม่นยำสูง แม้ในสภาวะที่รุนแรง เช่น สภาพแวดล้อมที่ไม่สามารถรับสัญญาณ GPS ได้ หรือเมื่อมีการเปลี่ยนแปลงของระดับแสงอย่างฉับพลัน ด้วยข้อได้เปรียบอย่างครบวงจรจาก "กำลังการประมวลผลสูง + การผสานข้อมูลจากหลายเซ็นเซอร์ (multi-sensor fusion) + การซิงโครไนซ์ฮาร์ดแวร์" ผลิตภัณฑ์นี้จึงส่งเสริมและสนับสนุนภาคส่วนล้ำสมัยต่าง ๆ อย่างกว้างขวาง ไม่ว่าจะเป็นปัญญาประดิษฐ์เชิงกายภาพ (Embodied AI), การตรวจสอบในอุตสาหกรรม และการขับขี่อัตโนมัติ ในแอปพลิเคชันหุ่นยนต์รูปลักษณ์มนุษย์ (humanoid robot) ผลิตภัณฑ์นี้ทำหน้าที่เป็นหน่วยรับรู้หลัก ซึ่งเมื่อทำงานร่วมกับกล้องแบบ global shutter จะสามารถหลีกเลี่ยงสิ่งกีดขวางได้ภายในระดับมิลลิวินาที และจับวัตถุได้อย่างแม่นยำ สำหรับการตรวจสอบในอุตสาหกรรมที่ใช้งานได้ทุกสภาพอากาศ ผลิตภัณฑ์นี้ใช้เซ็นเซอร์ระดับดาวตก (starlight-grade sensors) เพื่อให้มั่นใจในความปลอดภัยด้านการมองเห็นระหว่างปฏิบัติงานในเวลากลางคืน ส่วนในด้านการขับขี่อัตโนมัติความเร็วต่ำและการขนส่งด้วยยานพาหนะโลจิสติกส์ ผลิตภัณฑ์นี้สามารถสร้างภาพรอบทิศทาง 360° และการนำทางที่มีความแม่นยำสูง ผ่านการผสานภาพจากกล้องหลายตัว ไม่ว่าจะเพื่อการวิจัยและพัฒนา (R&D) หรือการนำไปใช้งานเชิงพาณิชย์ แพลตฟอร์มนี้ถือเป็นตัวเลือกที่เหมาะยิ่งสำหรับการแก้ไขปัญหาที่ซับซ้อนด้านการมองเห็นของเครื่องจักร
สถานการณ์การประยุกต์ใช้งาน
ผลิตภัณฑ์เทอร์มินัลที่รองรับการมองเห็น สำหรับใช้งานในภาคการเงิน สื่อมวลชน การชำระเงิน ค้าปลีก การควบคุมอุตสาหกรรม การศึกษา ภาครัฐและองค์กร รวมถึงด้านสาธารณสุข เหมาะสำหรับการประยุกต์ใช้งานในหลายสาขา เช่น หุ่นยนต์มนุษย์รูปแบบ ค้าปลีกอัจฉริยะ กล้องแบบพาโนรามา คลังสินค้าไร้คนขับ การจัดเรียงและจัดส่งสินค้าอย่างชาญฉลาด อุปกรณ์โดรนอัตโนมัติ
 |
 |
 |
 |
 |
 |
 |
 |
 |
พารามิเตอร์มาตรฐาน
| พารามิเตอร์หลัก | |
| CPU | โปรเซสเซอร์ 64 บิต 8 คอร์ (4×A72 + 4×A53) ความเร็วสูงสุด 2.2 GHz |
| GPU | G52 MC3 @ 1GHz รองรับ OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | หน่วยประมวลผล AI (NPU) กำลังประมวลผล 6 TOPS รองรับการดำเนินการแบบ INT4/INT8/INT16/FP16/BF16/TF32; สามารถทำงานร่วมกันแบบสองคอร์หรือทำงานแยกกันได้; รองรับการทำงานหลายภาระงานพร้อมกันและการประมวลผลแบบขนานในหลากหลายสถานการณ์ |
| Isp | ติดตั้ง ISP ภายในความละเอียด 16 ล้านพิกเซล รองรับการลดสัญญาณรบกวนในสภาพแสงน้อย เซ็นเซอร์ RGB-IR และ HDR สูงสุด 120 dB ISP ที่ผสานเทคโนโลยี AI ช่วยปรับปรุงคุณภาพภาพและลดสัญญาณรบกวน |
| หน่วยความจำ | LPDDR4/LPDDR4x/LPDDR5 (เลือกได้ตามต้องการ: 4GB/8GB/16GB) |
| หน่วยเก็บข้อมูลในตัว | eMMC (เลือกได้ตามต้องการ: 16GB/32GB/64GB/128GB/256GB) |
| การเข้ารหัสวิดีโอ | การถอดรหัสวิดีโอ: 8K@30fps/4K@120fps (H.265/HEVC, VP9, AVS2, AV1), 4K@60fps (H.264/AVC) การถอดรหัสวิดีโอ: 4K@60fps (H.265/HEVC, H.264/AVC) การถอดรหัสภาพ: MJPG ที่ความละเอียด 4K@60fps |
| พลังงาน | DC 5V |
| ระบบปฏิบัติการ | รองรับเคอร์เนล RTLinux ซึ่งมีประสิทธิภาพแบบเรียลไทม์ที่ยอดเยี่ยม และใช้กันอย่างแพร่หลายในแอปพลิเคชันอุตสาหกรรม รองรับระบบปฏิบัติการ Linux และ Buildroot เพื่อจัดเตรียมสภาพแวดล้อมระบบอันปลอดภัยและเสถียรสำหรับการพัฒนาผลิตภัณฑ์และการผลิต มีความสามารถอุตสาหกรรมใหม่ๆ เช่น การเชื่อมต่อเครือข่ายแบบเรียลไทม์ (Real-time Networking), Flexbus, การแยกทรัพยากรฮาร์ดแวร์ (Hardware Resource Isolation) และ DSMC ซึ่งตอบสนองความต้องการแอปพลิเคชันอุตสาหกรรมที่หลากหลาย |
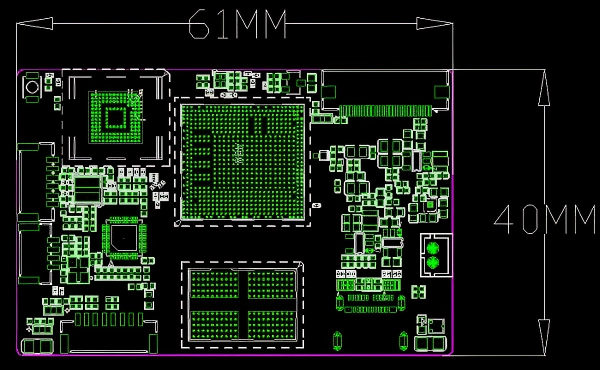
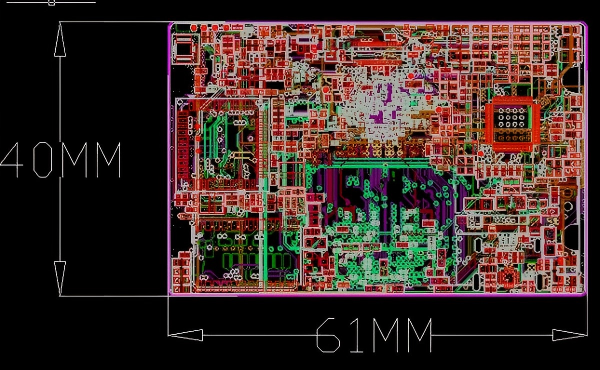
| ขนาด | 61 มม. × 40 มม. × 9 มม. |
| รองรับกล้อง | อินเทอร์เฟซ MIPI แบบ 4 ช่องทาง 2 เส้น: OV9281, IMX662, AR0234, IM464 เป็นต้น รองรับการปรับแต่งตามความต้องการ |
| ไจโรสโคป IMU | ไจโรสโคปซีรีส์ ICM42670 จำนวน 4 ตัวของ TDK |
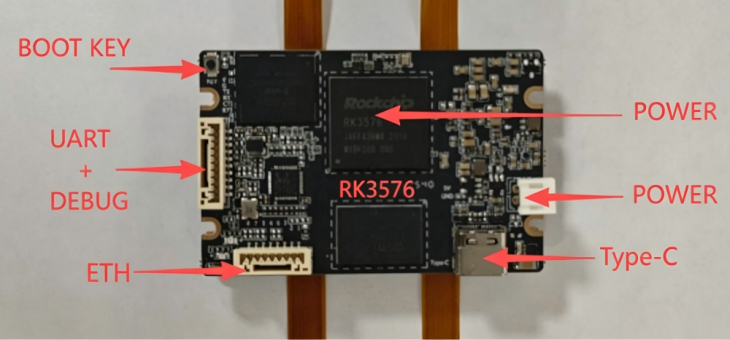
| อีเธอร์เน็ต | พอร์ตอีเธอร์เน็ตความเร็วหนึ่งกิกะบิต 1 พอร์ต (เชื่อมต่อผ่านซ็อกเก็ตเวเฟอร์แบบ 8P-1.25 มม.) |
| ไวไฟ/พีดีเอ | ติดตั้งโมดูลไวไฟในตัวที่รองรับไวไฟ 6 แบบสองแถบ (802.11a/b/g/n/ac/ax) ที่ความถี่ 2.4 กิกะเฮิร์ตซ์และ 5 กิกะเฮิร์ตซ์ พร้อมรองรับบลูทูธ |
| USB | พอร์ตยูเอสบี 3.0 แบบไทป์-ซีภายนอก 1 พอร์ต (รองรับ ADB) |
| เสาอากาศ | เส้นทางที่ 1 |
| ปุ่มกด | ปุ่มที่ 1 |
| อินเทอร์เฟซอื่นๆ | ช่อง UART 1 ช่อง ช่องดีบัก 1 ช่อง |
ขนาดของเมนบอร์ด
 |
 |
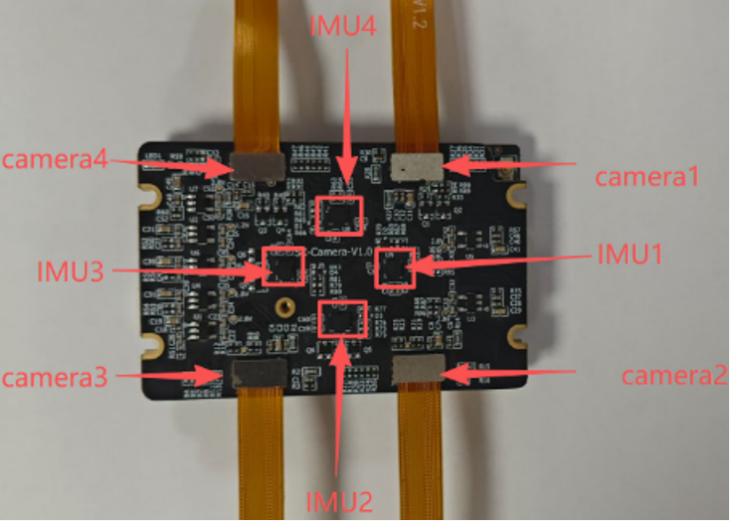
คำอธิบายอินเทอร์เฟซ
 |
 |
ข้อควรระวัง
ลักษณะสิ่งแวดล้อม
อุณหภูมิ
ใช้งานได้ที่อุณหภูมิ 0 ถึง +40 องศาเซลเซียส
เก็บรักษาได้ที่อุณหภูมิ -20 ถึง +70 องศาเซลเซียส
ความชื้นสัมพัทธ์ขณะเก็บรักษา
ใช้งานได้ที่ความชื้นสัมพัทธ์ 10 ถึง 90% (ไม่มีการควบแน่น)
เก็บรักษาได้ที่ความชื้นสัมพัทธ์ 5 ถึง 95% (ไม่มีการควบแน่น)
ความสูง
ใช้งานได้ที่ระดับความสูงสูงสุด 10,000 ฟุต
เก็บรักษาได้ที่ระดับความสูงสูงสุด 20,000 ฟุต
อุณหภูมิสูงและการเก็บรักษา
วิธีและเงื่อนไขการทดสอบโปรดดูรายละเอียดในมาตรฐาน GB2423.2 "การทดสอบ Bd และ Bb"
อุณหภูมิต่ำและการเก็บรักษา
วิธีการทดสอบและเงื่อนไข โปรดดูรายละเอียดในมาตรฐาน GB2423.1 "การทดสอบ Ad และ Ab"
การทดสอบความชื้นและอุณหภูมิ
วิธีการทดสอบและเงื่อนไข โปรดดูรายละเอียดในมาตรฐาน GB2423.3 "การทดสอบ Ca" และ GB2423.22 "การทดสอบ Nb"
ข้อควรระวังในการประกอบและการใช้งาน
ระหว่างการประกอบและการใช้งาน โปรดใส่ใจและตรวจสอบประเด็นที่อาจเกิดปัญหาต่อไปนี้ (แต่ไม่จำกัดเพียงเท่านี้)



