






- Aperçu
- Produits recommandés
- Les cartes PCBA et les composants électroniques sont très sensibles aux décharges électrostatiques (ESD). Les opérateurs doivent porter des bracelets antistatiques ou des gants avant de manipuler les cartes ou d’effectuer le montage, afin d’assurer une dissipation adéquate des charges statiques.
- Pendant le processus d’installation et de fixation, évitez toute déformation de la carte mère causée par les contraintes liées à la fixation ;
- Assurez-vous de l’alignement correct de l’interface MIPI lors de l’installation de la caméra. Vérifiez l’orientation de la broche 1 ;
- Assemblage du connecteur B2B : Suivez la séquence « accouplement d’abord, vissage ensuite ». Alignez et poussez les connecteurs pour les accoupler complètement avant de serrer les quatre vis situées aux coins. Cela garantit que le connecteur résiste aux contraintes vibratoires, tandis que les vis supportent principalement le poids.
- Lors de l’installation des périphériques (USB, E/S, etc.), veillez aux niveaux d’entrée/sortie des périphériques et aux problèmes de courant fourni.
- Lors de l’installation du port série, vérifiez si les dispositifs RS232 et TTL sont directement connectés, si les connexions TX et RX sont correctes et si les niveaux logiques sont adaptés.
- Vérifiez si l’alimentation d’entrée est bien connectée à l’interface d’entrée d’alimentation, et si la tension, le courant, etc. de l’alimentation d’entrée répondent aux exigences en fonction de l’ensemble des périphériques.
Description
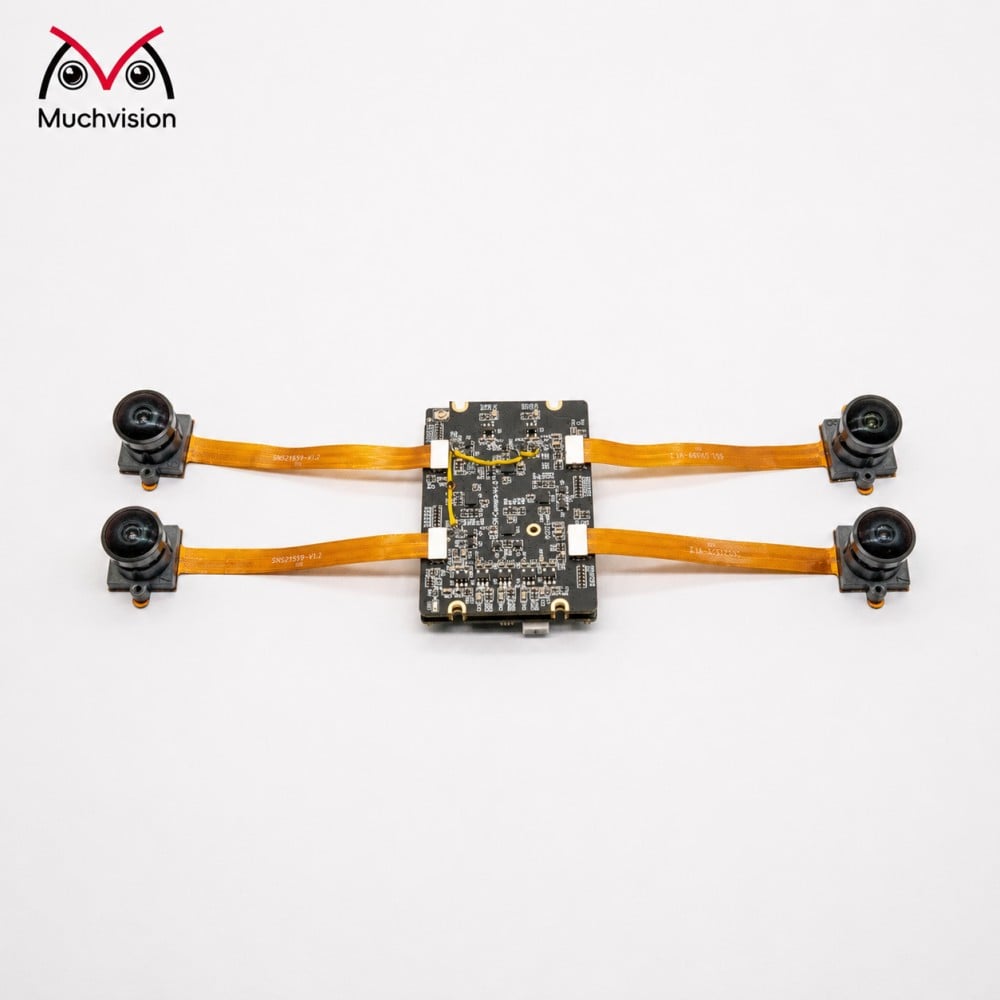
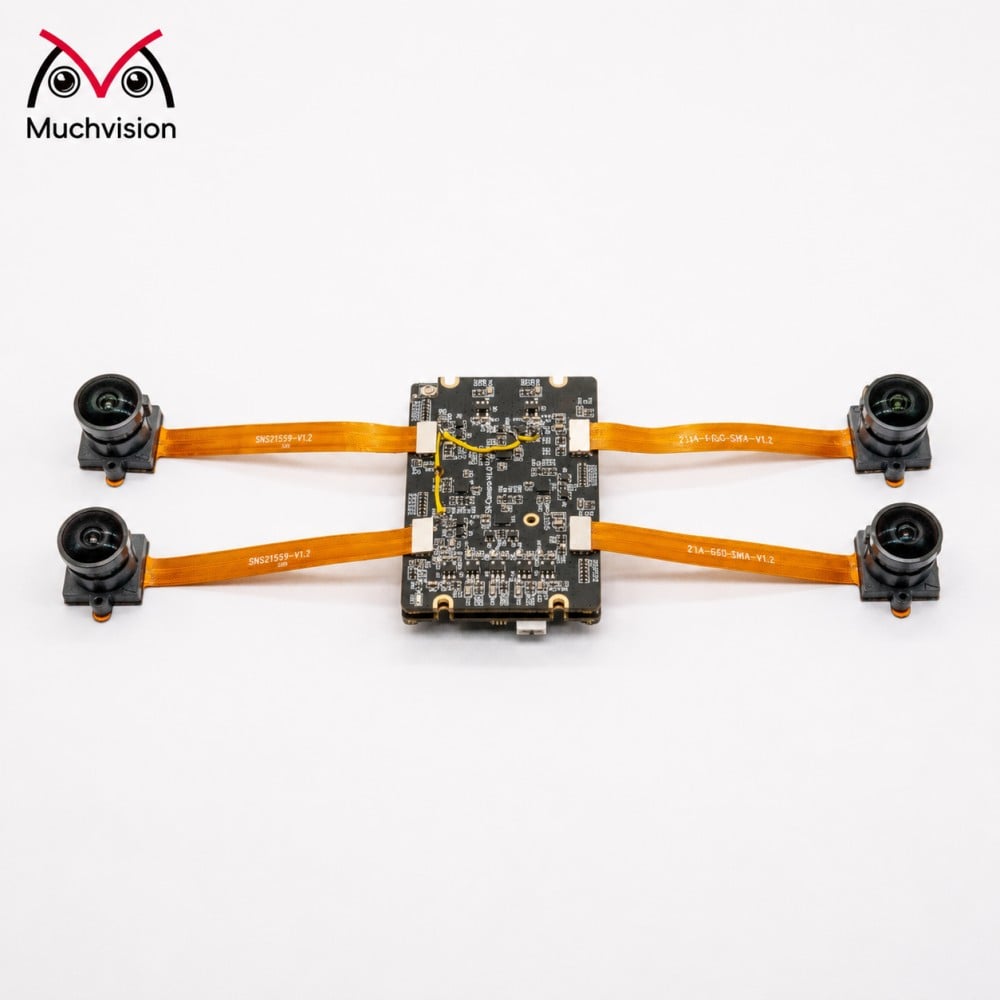
MV11-V1.0 Ce produit est une plateforme de calcul de fusion navigation visuelle-inertielle synchronisée quadricanaux, basée sur le processeur haute performance Rockchip RK3576. Elle intègre une unité de mesure inertielle (IMU) haute précision et quatre interfaces caméra MIPI indépendantes. Grâce à un mécanisme de déclenchement de synchronisation au niveau matériel, elle garantit un alignement spatio-temporel au niveau de la microseconde entre les images visuelles multicanaux et les données de mouvement et d’attitude.
Grâce à l’architecture hétérogène à 8 cœurs et à la puissance de calcul IA du RK3576, le système prend non seulement en charge le traitement parallèle de plusieurs flux vidéo HD, mais exécute également en temps réel, en périphérie, des algorithmes complexes de cartographie SLAM, de localisation VIO et d’inférence IA. Cela fournit une base de données solide pour une perception précise dans des environnements dynamiques.
Ce produit se distingue par une compatibilité exceptionnelle avec les capteurs et une grande adaptabilité à divers scénarios, permettant la sélection souple de capteurs haute performance couramment utilisés afin de concevoir des solutions de perception sur mesure. Il est compatible avec une variété de capteurs à faible luminosité et à obturateur global, notamment les IMX662, IMX464, OV9281 et AR0234. Couplé à la compensation d’attitude à 6 axes fournie par l’IMU embarqué, le système maintient des capacités élevées de localisation autonome et de perception de l’environnement, même dans des conditions extrêmes telles qu’un environnement dépourvu de signal GPS ou des changements brutaux d’éclairage. Grâce aux avantages complets de sa « puissance de calcul élevée + fusion multi-capteurs + synchronisation matérielle », ce produit renforce considérablement des domaines de pointe tels que l’intelligence artificielle incarnée (Embodied AI), l’inspection industrielle et la conduite autonome. Dans les applications de robots humanoïdes, il constitue une unité centrale de perception, permettant une détection d’obstacles en millisecondes et une préhension précise lorsqu’il est associé à des caméras à obturateur global. Pour l’inspection industrielle tout-temps, il exploite des capteurs de niveau « lumière des étoiles » afin d’assurer la sécurité visuelle lors des opérations nocturnes. Dans le domaine de la conduite autonome à basse vitesse et des véhicules logistiques, il assure une vision panoramique à 360° et une navigation haute précision grâce à la fusion visuelle multi-caméras. Que ce soit pour la recherche et le développement ou pour un déploiement commercial, cette plateforme constitue un choix idéal pour résoudre des défis complexes de vision par ordinateur.
Scénarios d'application
Produits terminaux dotés de capacités visuelles pour les secteurs de la finance, des médias, des paiements, du commerce de détail, de la commande industrielle, de l’éducation, des administrations publiques/entreprises et des soins de santé. Ils conviennent à des applications telles que les robots humanoïdes, le commerce de détail intelligent, les caméras panoramiques, les entrepôts sans personnel, le tri et la livraison intelligents, ainsi que les équipements de drones automatisés.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Paramètres standards
| Paramètres clés | |
| CPU | Processeur 64 bits octo-cœur (4 × A72 + 4 × A53), avec une fréquence d’horloge maximale de 2,2 GHz |
| GPU | G52 MC3 @ 1 GHz, prenant en charge OpenGL ES 1.1/2.0/3.2, OpenCL 2.0 et Vulkan 1.1 |
| NPU | unité de traitement neuronale (NPU) offrant une puissance de calcul de 6 TOPS, prenant en charge les opérations INT4/INT8/INT16/FP16/BF16/TF32 ; capable de fonctionner en collaboration double cœur ou de manière autonome ; prend en charge le multitâche et le traitement parallèle dans divers scénarios |
| Isp | Doté d’un processeur d’image intégré (ISP) de 16 mégapixels prenant en charge la réduction du bruit en faible luminosité, d’un capteur RVB-IR et d’une plage dynamique étendue (HDR) allant jusqu’à 120 dB. L’ISP alimenté par l’intelligence artificielle améliore la qualité d’image tout en réduisant le bruit. |
| mémoire | LPDDR4/LPDDR4x/LPDDR5 (4 Go/8 Go/16 Go en option) |
| Stockage intégré | eMMC (16 Go/32 Go/64 Go/128 Go/256 Go en option) |
| Encodage vidéo | Décodage vidéo : 8K@30 ips / 4K@120 ips (H.265/HEVC, VP9, AVS2, AV1) ; 4K@60 ips (H.264/AVC) Décodage vidéo : 4K@60 ips (H.265/HEVC, H.264/AVC) Décodage d’images : MJPG en 4K@60 ips |
| puissance | DC 5V |
| Système d'exploitation | Prend en charge le noyau RTLinux offrant d’excellentes performances temps réel, largement utilisé dans les applications industrielles. Prend en charge le système d’exploitation Linux et Buildroot afin de fournir un environnement système sécurisé et stable pour le développement et la production de produits. Il intègre de nouvelles fonctionnalités industrielles telles que la mise en réseau temps réel, Flexbus, l’isolement matériel des ressources et DSMC, répondant ainsi à des exigences variées dans les applications industrielles. |
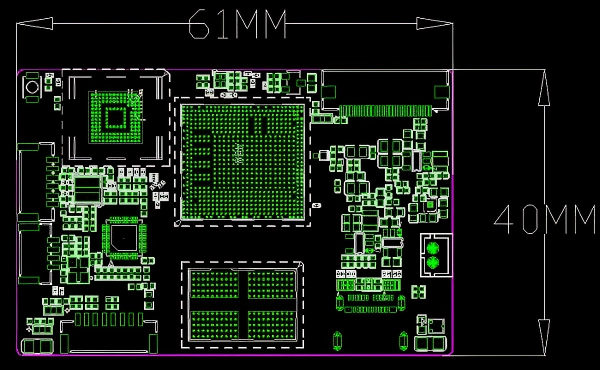
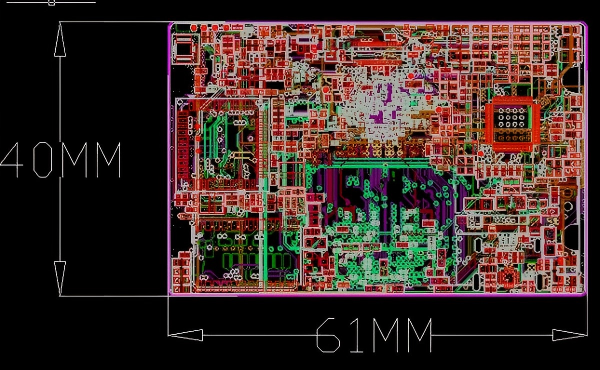
| dimensions | 61 mm × 40 mm × 9 mm |
| Prise en charge de la caméra | interface MIPI à 4 voies et 2 pistes : OV9281, IMX662, AR0234, IM464, etc., avec possibilité de personnalisation |
| Gyroscope IMU | 4 gyroscopes de la série TDK ICM42670 |
| Ethernet | 1 port Ethernet Gigabit (connecté via une prise femelle à 8 broches, pas de 1,25 mm) |
| Wi-Fi / PDA | Équipé d’un module Wi-Fi intégré prenant en charge le Wi-Fi double bande 6 (802.11a/b/g/n/ac/ax) aux fréquences 2,4 GHz et 5 GHz, ainsi que le Bluetooth. |
| USB | 1 port USB 3.0 externe de type C (prend en charge ADB) |
| antenne | Itinéraire 1 |
| poussoir | Bouton 1 |
| Autres interfaces | 1 canal UART, 1 canal de débogage |
Taille de la carte mère
 |
 |
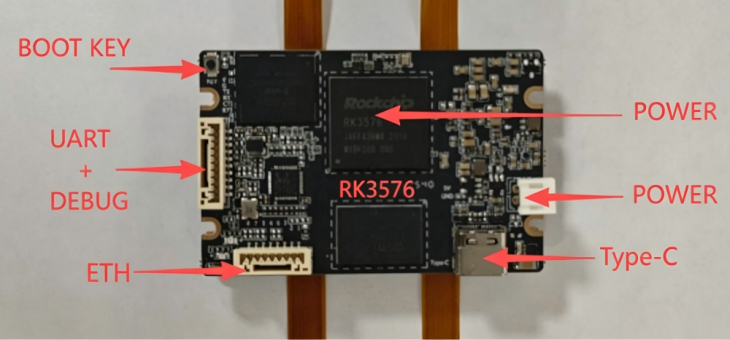
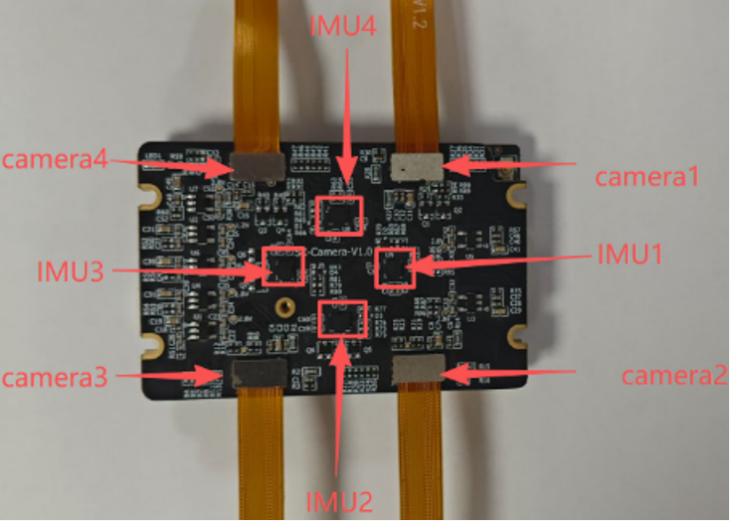
Description de l’interface
 |
 |
Précautions
Caractéristiques environnementales
Température
Fonctionnement : 0 ℃ à +40 ℃
Stockage : -20 ℃ à +70 ℃
Humidité de stockage
Fonctionnement : 10 % à 90 % (sans condensation)
Stockage : 5 % à 95 % (sans condensation)
Altitude
Fonctionnement : jusqu’à 10 000 pi (maximum)
Stockage : jusqu’à 20 000 pi (maximum)
Haute température et stockage
Méthode et conditions d’essai : veuillez consulter la description de la norme GB2423.2 « Essais Bd et Bb »
Basse température et stockage
Méthode et conditions d’essai : veuillez consulter la description de la norme GB2423.1 « Essai Ad et Ab »
Essai d’humidité et de température
Méthode et conditions d’essai : veuillez consulter la description des normes GB2423.3 « Essai Ca » et GB2423.22 « Essai Nb »
Précautions relatives au montage et à l’utilisation
Pendant le montage et l’utilisation, veuillez prêter attention aux points problématiques suivants (liste non exhaustive) et les vérifier :



