






- Gambaran Keseluruhan
- Produk yang Disyorkan
- PCBA dan komponen elektronik sangat sensitif terhadap ESD. Operator diwajibkan memakai tali pergelangan ESD atau sarung tangan sebelum mengendalikan papan atau pemasangan untuk memastikan pelepasan statik yang betul.;
- Semasa proses pemasangan dan pematerian, elakkan ubah bentuk papan induk yang disebabkan oleh faktor pematerian;
- Pastikan penyelarasan antara muka MIPI adalah betul semasa pemasangan kamera. Sahihkan arah Pin 1;
- Pemasangan Penyambung B2B: Ikuti urutan "pasangkan dahulu, ketatkan sekrup kemudian". Selaraskan dan tekan penyambung untuk memasangkannya sepenuhnya sebelum mengikat keempat sekrup di penjuru. Ini memastikan penyambung mampu menahan tekanan getaran, manakala sekrup terutamanya menyokong berat.;
- Apabila memasang peranti tambahan (USB, IO, ETC), beri perhatian kepada aras IO peranti tambahan dan isu keluaran arus;
- Apabila memasang port siri, beri perhatian kepada sama ada peranti RS232 dan TTL disambungkan secara langsung, sama ada kaedah sambungan TX dan RX adalah betul, serta sama ada aras voltan adalah betul;
- Sama ada bekalan kuasa masukan telah disambungkan ke antara muka input kuasa, dan sama ada voltan serta arus bekalan kuasa masukan memenuhi keperluan berdasarkan jumlah peranti tambahan.
Penerangan
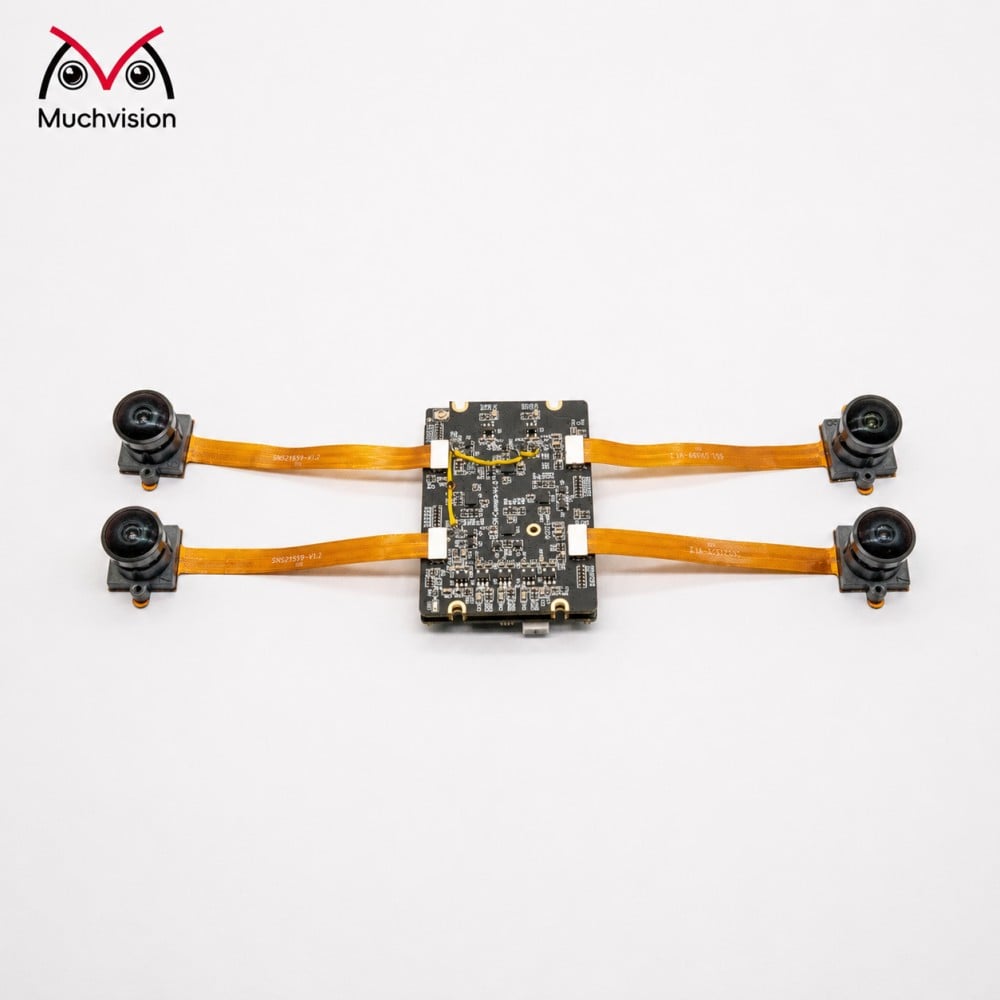
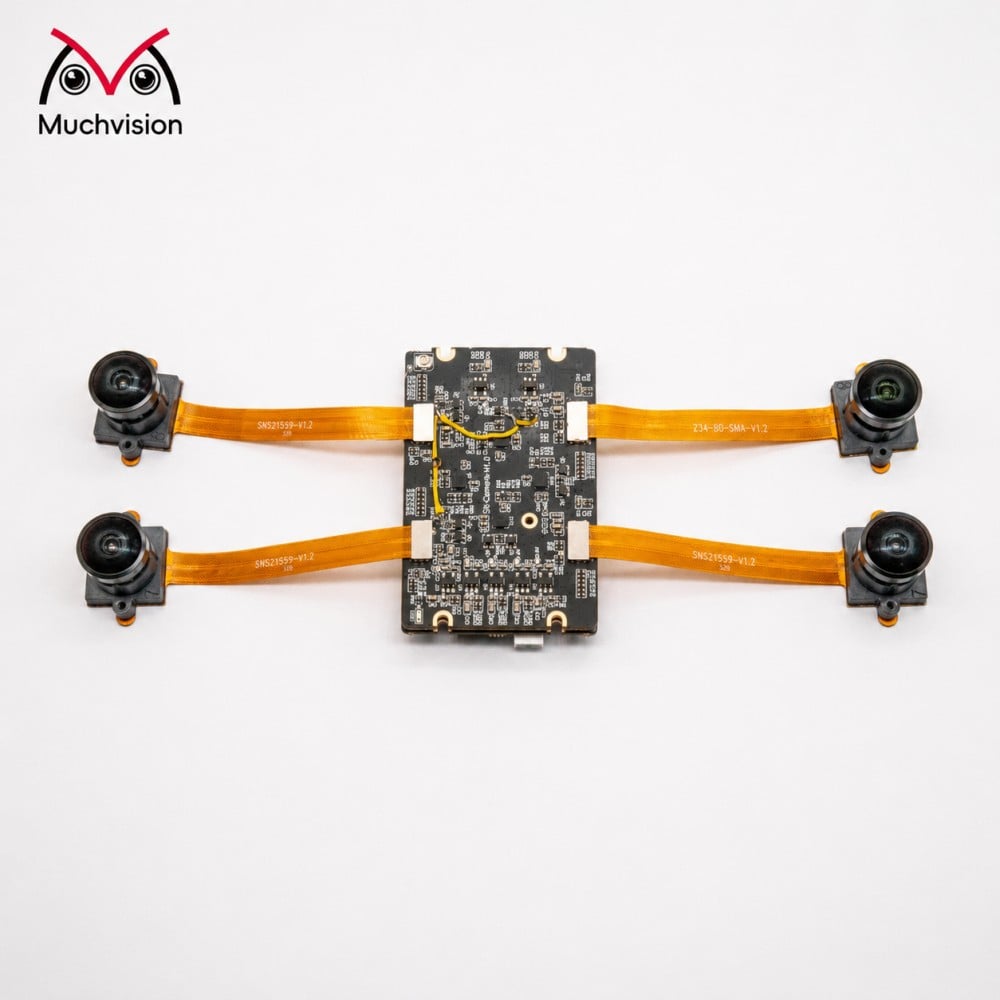
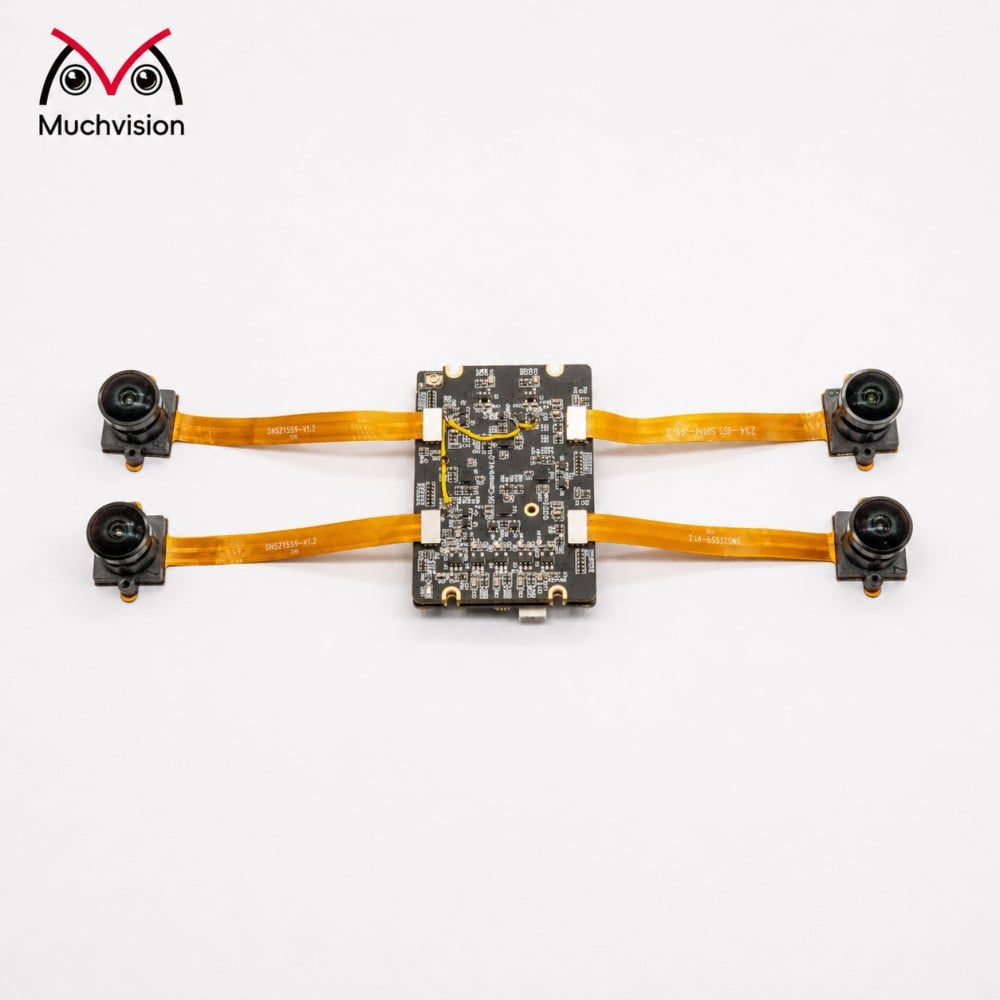
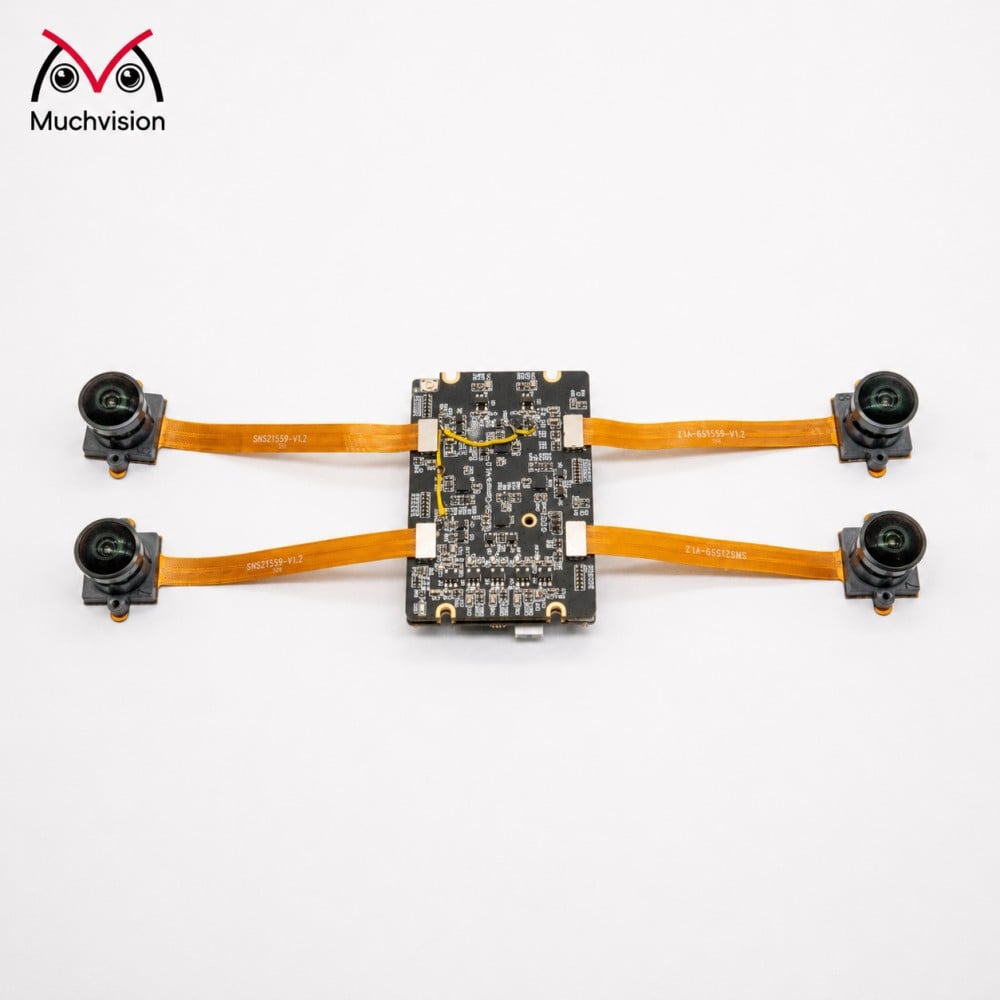
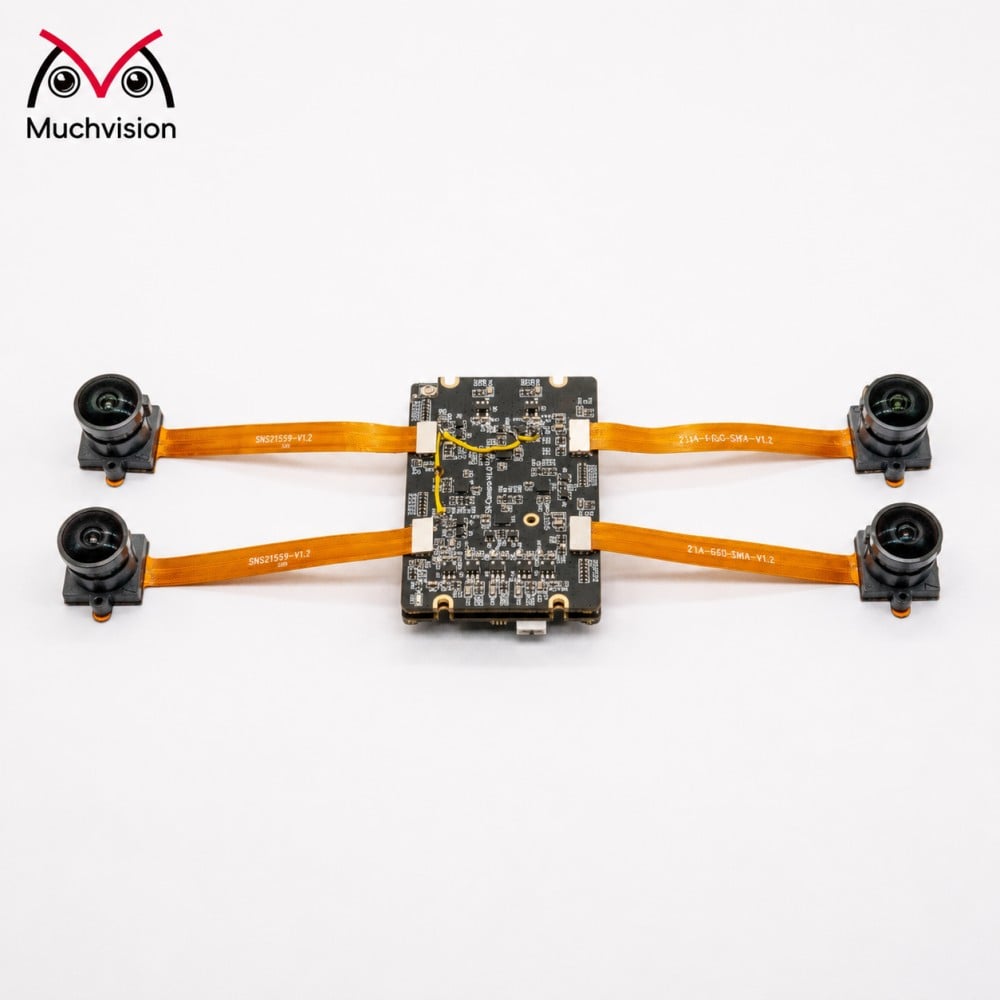
MV11-V1.0 Produk ini ialah platform penggabungan navigasi visual-inersia bersinkron empat saluran, dibina berdasarkan pemproses berprestasi tinggi Rockchip RK3576. Ia mengintegrasikan IMU (Unit Pengukuran Inersia) berketepatan tinggi dengan empat antara muka kamera MIPI yang bebas. Melalui mekanisme pencetus sinkron aras perkakasan, ia memastikan penyelarasan ruang-masa di aras mikrosaat antara imej visual pelbagai saluran dan data sikap pergerakan.
Dengan memanfaatkan arkitektur heterogen lapan teras dan kuasa pengkomputeran AI RK3576 yang hebat, sistem ini tidak hanya menyokong pemprosesan selari beberapa aliran video HD tetapi juga menjalankan algoritma pemetaan SLAM, penempatan VIO, dan inferens AI yang kompleks secara masa nyata di hujung rangkaian. Ini memberikan asas data yang kukuh bagi persepsi tepat dalam persekitaran dinamik.
Produk ini menawarkan keserasian sensor yang luar biasa dan kemampuan penyesuaian terhadap pelbagai senario, menyokong pemilihan fleksibel sensor berprestasi tinggi utama untuk membina penyelesaian persepsi tersuai. Ia serasi dengan pelbagai sensor cahaya rendah dan sensor rana global, termasuk IMX662, IMX464, OV9281, dan AR0234. Dengan menggabungkan pemadanan sikap 6-sumbu yang disediakan oleh IMU dalaman, sistem ini mengekalkan keupayaan lokalisasi kendiri dan persepsi persekitaran yang tinggi ketepatannya walaupun dalam keadaan ekstrem seperti persekitaran tanpa GPS atau perubahan pencahayaan yang drastik. Dengan kelebihan komprehensif "kuasa pengiraan tinggi + pelbagai gabungan sensor + penyegerakan perkakasan", produk ini secara meluas memperkasa bidang terkini seperti AI Berbadan, pemeriksaan industri, dan pemanduan autonomi. Dalam aplikasi robot humanoid, ia berfungsi sebagai unit persepsi utama, membolehkan pengelakan halangan pada tahap milisaat dan pegangan tepat apabila dipasangkan dengan kamera rana global. Untuk pemeriksaan industri dalam semua cuaca, ia menggunakan sensor tahap bintang untuk memastikan keselamatan visual semasa operasi malam. Dalam bidang pemanduan autonomi kelajuan rendah dan kenderaan logistik, ia mencapai pandangan sekeliling 360° dan navigasi ketepatan tinggi melalui pelbagai gabungan visual kamera. Sama ada untuk penyelidikan dan pembangunan (R&D) atau pelaksanaan komersial, platform ini merupakan pilihan ideal untuk menyelesaikan cabaran penglihatan mesin yang kompleks.
Senario Penggunaan
Produk terminal berasaskan visual untuk pelbagai sektor seperti kewangan, media, pembayaran, runcit, kawalan industri, pendidikan, kerajaan/perniagaan, dan penjagaan kesihatan. Ia sesuai untuk aplikasi seperti robot humanoid, runcit pintar, kamera panorama, gudang tanpa pemandu, pengisihan dan penghantaran pintar, serta peralatan UAV automatik.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Parameter Piawai
| Parameter utama | |
| CPU | Pemproses lapan teras 64-bit (4×A72 + 4×A53), dengan kelajuan jam maksimum 2.2 GHz |
| GPU | G52 MC3 @ 1GHz, menyokong OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | kuasa pengiraan NPU sehingga 6 TOPS, menyokong operasi INT4/INT8/INT16/FP16/BF16/TF32; mampu beroperasi secara kerjasama dua teras atau secara bebas; menyokong multitasking dan pemprosesan selari dalam pelbagai senario |
| ISP | Dilengkapi ISP dalaman 16 megapixel yang menyokong pengurangan hingar dalam keadaan cahaya rendah, sensor RGB-IR, dan HDR sehingga 120 dB. AI-ISP meningkatkan kualiti imej dengan pengurangan hingar. |
| ingatan | LPDDR4/LPDDR4x/LPDDR5 (pilihan: 4GB/8GB/16GB) |
| Ruang simpan binaan | eMMC (pilihan: 16GB/32GB/64GB/128GB/256GB) |
| Penyulitan video | Penyahkodan Video: 8K@30fps/4K@120fps (H.265/HEVC, VP9, AVS2, AV1); 4K@60fps (H.264/AVC) Penyahkodan Video: 4K@60fps (H.265/HEVC, H.264/AVC) Penyahkodan Imej: 4K@60fps MJPG |
| kuasa | DC 5V |
| OS | Menyokong kernel RTLinux dengan prestasi masa nyata yang sangat baik, banyak digunakan dalam aplikasi industri. Menyokong OS Linux dan Buildroot untuk menyediakan persekitaran sistem yang selamat dan stabil bagi pembangunan produk dan pengeluaran. Ia menampilkan kemampuan industri baharu seperti rangkaian masa nyata, Flexbus, pengasingan sumber daya perkakasan, dan DSMC, memenuhi pelbagai keperluan aplikasi industri. |
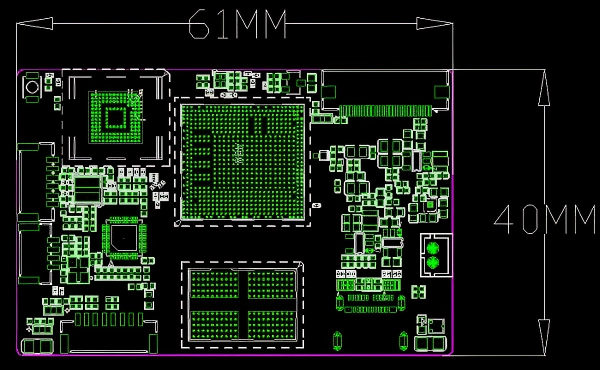
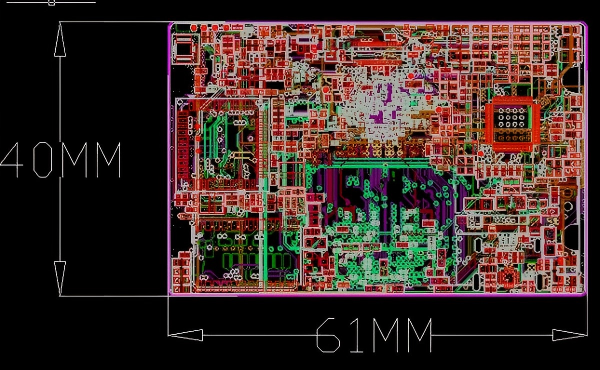
| saiz | 61 mm × 40 mm × 9 mm |
| Menyokong Kamera | 4 saluran, antara muka MIPI 2-lane: OV9281, IMX662, AR0234, IM464, dll., menyokong penyesuaian |
| Gyroskop IMU | 4 unit giroskop siri TDK ICM42670 |
| Ethernet | 1 × port Ethernet Gigabit (disambung melalui soket Wafer 8P-1.25 mm) |
| Wi-Fi/ PDA | Dilengkapi dengan modul Wi-Fi terbina dalam yang menyokong Wi-Fi 6 dwi-jalur (802.11a/b/g/n/ac/ax) pada 2.4 GHz dan 5 GHz, bersama-sama dengan sokongan Bluetooth. |
| USB | 1 port luaran USB 3.0 Jenis-C (menyokong ADB) |
| antena | Laluan 1 |
| tombol tekan | Butang 1 |
| Antara Muka Lain | 1 saluran UART, 1 saluran Debug |
Saiz Papan Ibu
 |
 |
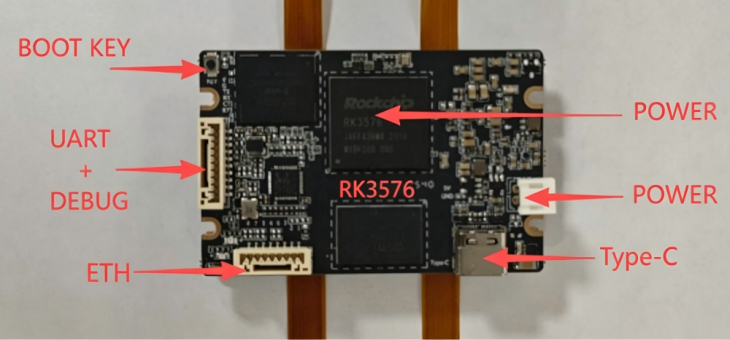
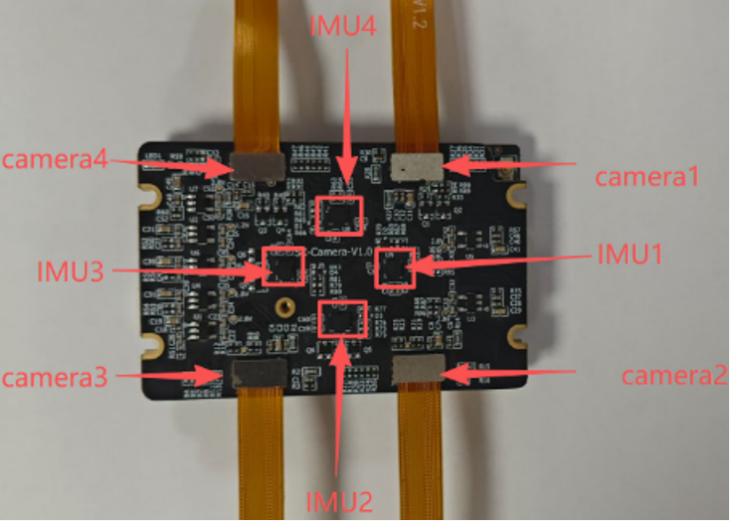
Penerangan Antara Muka
 |
 |
Langkah berjaga-jaga
Ciri-ciri persekitaran
Suhu
Beroperasi: 0℃ hingga +40℃
Penyimpanan: -20℃ hingga +70℃
Kelembapan Semasa Penyimpanan
Beroperasi: 10% hingga 90% (tanpa kondensasi)
Penyimpanan: 5% hingga 95% (tanpa kondensasi)
Ketinggian
Beroperasi: 10,000 kaki (maksimum)
Penyimpanan: 20,000 kaki (maksimum)
Suhu Tinggi & Penyimpanan
Kaedah & keadaan ujian sila rujuk penerangan GB2423.2 “Ujian Bd & Bb”
Suhu Rendah & Penyimpanan
Kaedah ujian & keadaan, sila rujuk penerangan GB2423.1 “Ujian Ad & Ab”
Ujian Kelembapan & Suhu
Kaedah ujian & keadaan, sila rujuk penerangan GB2423.3 “Ujian Ca” & GB2423.22 “Ujian Nb”
Langkah berjaga-jaga semasa pemasangan dan penggunaan
Semasa pemasangan dan penggunaan, sila beri perhatian dan semak perkara-perkara berikut (dan tidak terhad kepada):



