






- Bayani
- Kayan da aka ba da shawara
- PCBA da abubuwan elektroniki suna da kyau wajen ESD. Alama suka yi amfani da ESD wrist straps ko gloves a cikin zamanin da su ke yi aiki da boards ko aikin yin kuma don tabbatar da cewa static yana taka daidai.;
- A cikin zamanin da aikin yin kuma da aikin haɗawa, kuna kwafi da kariya na motherboard wanda ke neman aikin haɗawa;
- Tabbatar da cewa MIPI interface ya dace a cikin zamanin da aikin yin kuma na camera. Duba hanyar Pin 1;
- B2B Connector Assembly: Ku biyo "mate first, screw later". Ku dace da ku daga kuma connectors don yin mate a cikin zamanin da suka dace kamar yadda suka dace kuma sannan ku kara kwayoyin da suka tsaki da kwayoyin da suka tsaki. Wannan yana tabbatar da cewa connector yana tabbatar da vibration stress, kuma kwayoyi suna tabbatar da weight.;
- A cikin zamanin da aikin yin kuma na abubuwan da suka fara (USB, IO, ETC), ku biyo da abubuwan da suka fara IO levels da current output issues;
- A lokacin da aka saita serial port, ku ci gaba da kamar yadda RS232 da TTL devices sun haɗa daidai, kamar yadda TX da RX sun haɗa daidai, da kamar yadda level ya dace;
- Yi amfani da kamar yadda input power ta haɗa da power input interface, da kamar yadda voltage na input power, current, da sauran abubuwan da suka gabata daidai da kira na peripherals doun.
Bayanin
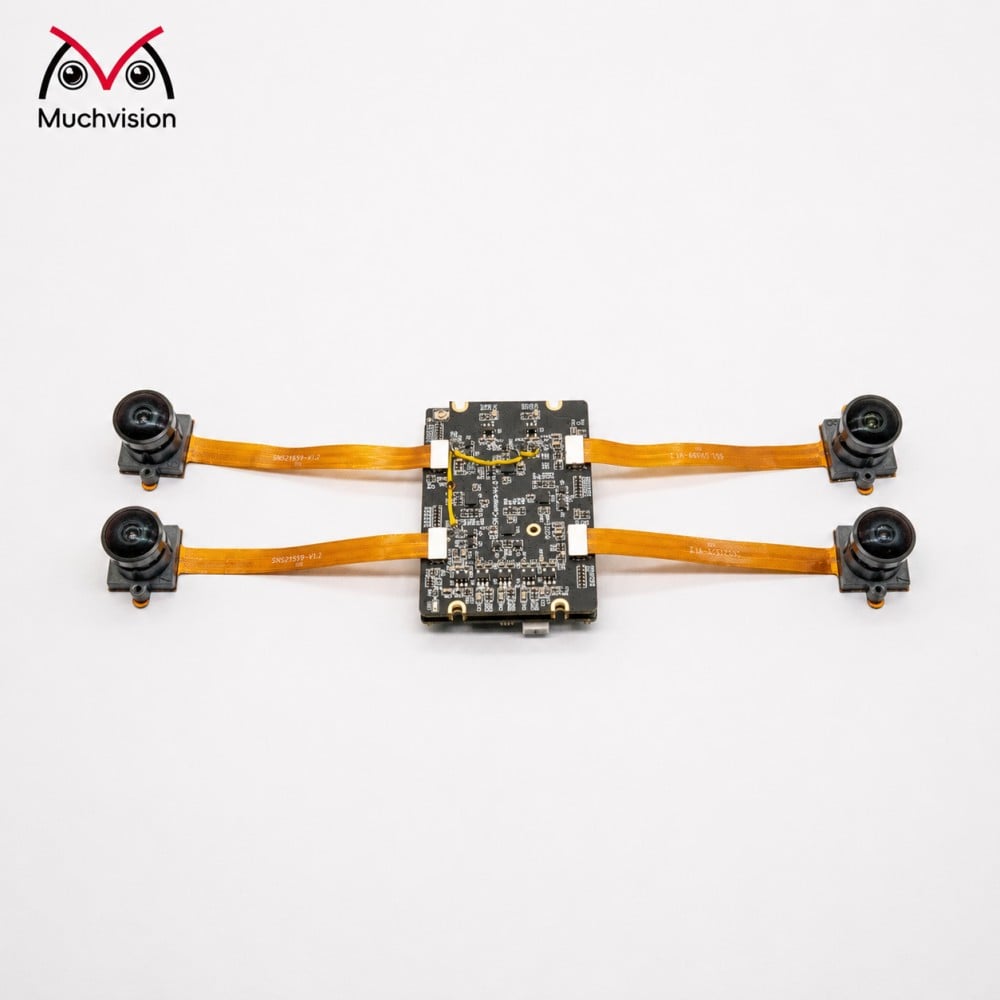
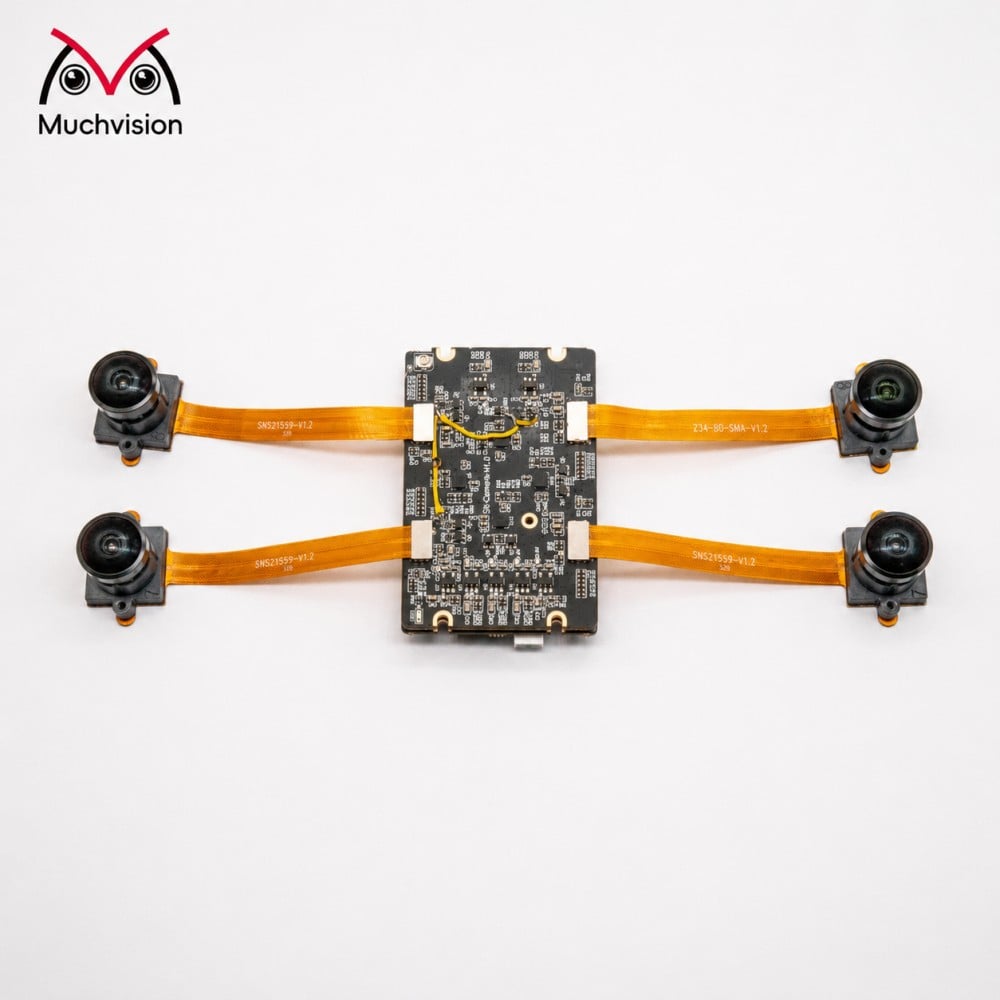
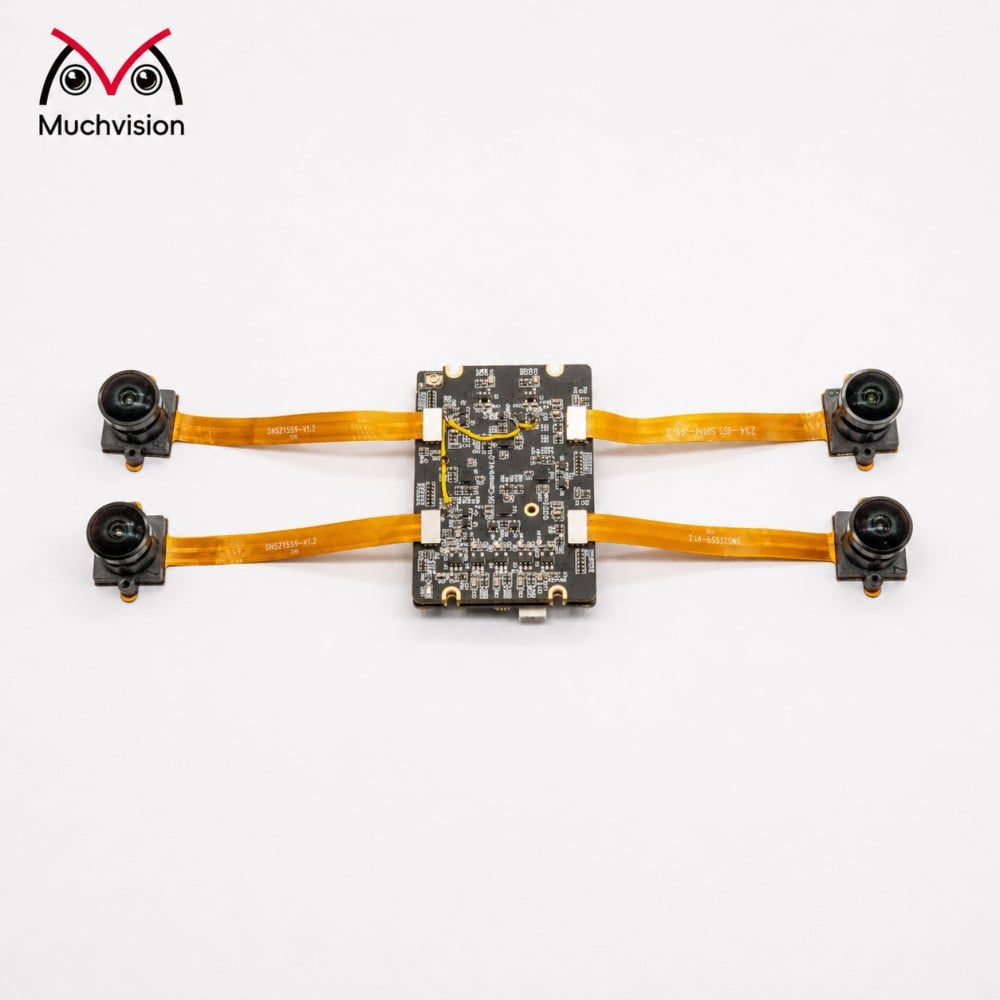
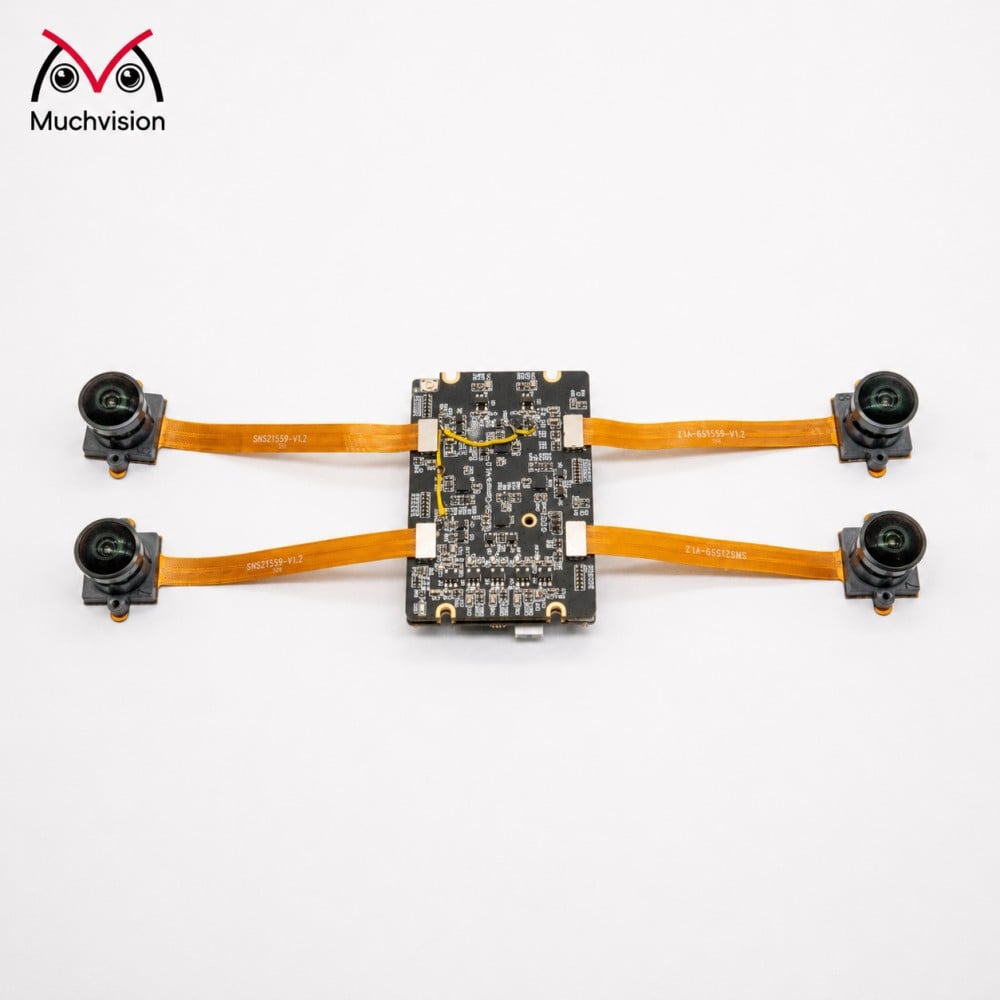
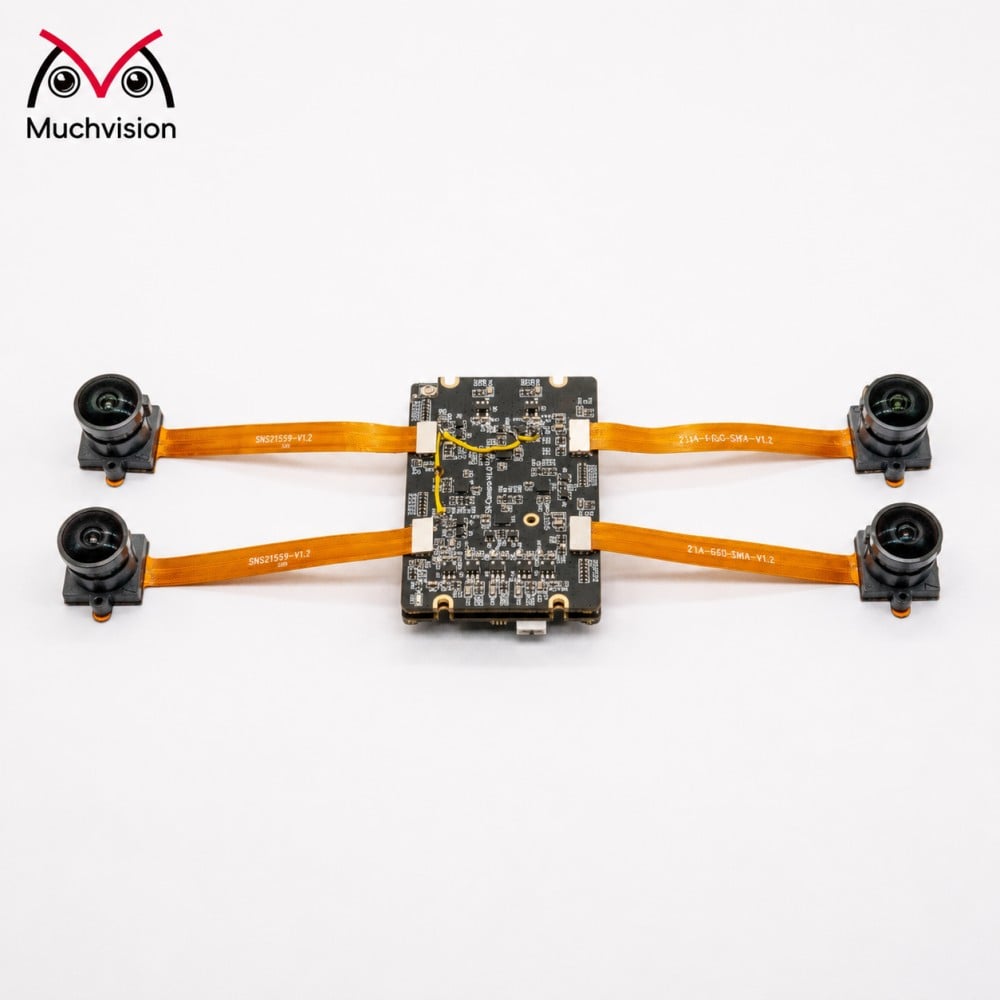
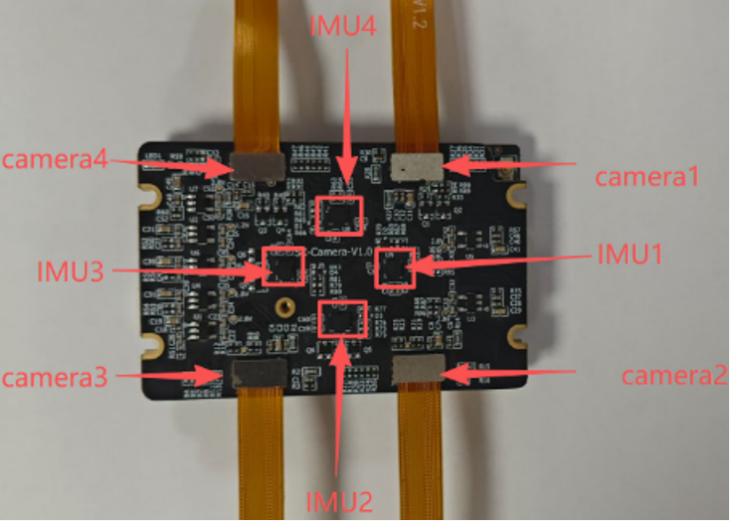
MV11-V1.0 Wannan samfurin shine dandamali na haɗin gwiwar kewayawa mai aiki tare da tashoshi huɗu, wanda aka gina akan babban mai sarrafa Rockchip RK3576. Yana da cikakken daidaito na IMU (Inertial Measurement Unit) tare da haɗin MIPI na kyamara guda huɗu. Ta hanyar tsarin aiki tare na kayan aiki, yana tabbatar da daidaiton sararin samaniya tsakanin yanayin gani da yanayin motsi.
Ta hanyar alhaji na RK3576 wanda ke da ƙaramin 8 da ke cikin su da alhaji na AI, wannan sistema ba taka da ayyukan video na HD na maha da yawa amma ya zama da ayyukan SLAM mapping, VIO localization, da ayyukan AI inference a lokacin da suka faru a gaba. Wannan yana ba da asalin bayani na kyau don fahimtar daidai a wurin da ke canza.
Wani abu na al'ada ya ƙara da karamin samun sensori da karamin yin amfani da su a cikin wasu halin da ke cikin wani duniya, ta hanyar yin amfani da sensorin da suka fiye da gaskiya a cikin wani duniya don haɗa da kira mai ƙarfi. Ya ƙara da karamin yin amfani da wasu sensorin da suka fiye da gaskiya da sensorin da suka fiye da gaskiya a cikin wani duniya, wadanda suka kasance IMX662, IMX464, OV9281, da AR0234. Ta hanyar yin amfani da ƙaramin ƙasa da ƙaramin fuskantar da aka saba wa IMU na jihirin, al'ada ta ƙara da karamin yin amfani da kira da karamin yin amfani da al'ada a cikin halin da ke cikin wani duniya, kamar halin da ba za a iya amfani da GPS ba ko halin da ke cikin wani duniya da sauran halin da ke cikin wani duniya. Ta hanyar yin amfani da karamin da suka fiye da gaskiya na "karamin yin amfani da kira + karamin yin amfani da sensorin da suka fiye da gaskiya + karamin yin amfani da hardware", wannan abu na al'ada ya ƙara da karamin yin amfani da sauran halin da ke cikin wani duniya, kamar Embodied AI, tattauna a cikin al'ummar, da yin amfani da kira a cikin wani duniya. A cikin halin da ke cikin wani duniya da robotin da suka fiye da gaskiya, ya ƙara da karamin yin amfani da kira da karamin yin amfani da kira a cikin wani duniya, ta hanyar yin amfani da kira da suka fiye da gaskiya a cikin wani duniya don haɗa da kira da karamin yin amfani da kira da karamin yin amfani da kira. A cikin halin da ke cikin wani duniya da tattauna a cikin al'ummar da ke cikin wani duniya, ya ƙara da karamin yin amfani da sensorin da suka fiye da gaskiya don haɗa da kira da karamin yin amfani da kira a cikin wani duniya. A cikin halin da ke cikin wani duniya da yin amfani da kira a cikin wani duniya da ke cikin wani duniya da ke cikin wani duniya, ya ƙara da karamin yin amfani da kira da karamin yin amfani da kira da karamin yin amfani da kira a cikin wani duniya. Wannan platform ya ƙara da karamin yin amfani da kira da karamin yin amfani da kira a cikin wani duniya da ke cikin wani duniya.
Mai amfani daidai
Produktin terminal na ƙarfi ta hanyar fahimta a cikin finans, media, bayani, kantin, kontrol na sana'a, tarbiya, sarakuna/kadauwa, da shugaban al'umma. Yana daidai don amfani a gurɓan abubuwa kamar robotin da yawa, kantin mai tsarin, kameran da yawa, kantin mai mutum, neman da bayyana mai tsarin, da abubuwan UAV mai tsarin.
 |
 |
 |
 |
 |
 |
 |
 |
 |
Bayanan da amincewa
| Alamar Tsarin Hanyar Aiki | |
| CPU | Prosesa na bakwai biyu (4×A72 + 4×A53), wanda yana da sautin sauyi na ƙarfi a matsayin 2.2 GHz |
| GPU | G52 MC3 @ 1GHz, ta tabbata OpenGL ES 1.1/2.0/3.2, OpenCL 2.0, Vulkan 1.1 |
| NPU | nPU na ƙarfi na 6 TOPS, ta tabbata amfanin INT4/INT8/INT16/FP16/BF16/TF32; ta iya amfani a cikin tashin bakwai ko a cikin tashin baya; ta tabbata amfani a cikin maimaita da amfani a cikin maimaita a cikin gurɓan abubuwa |
| ISP | Da ISP na 16-megapixel a cikin, ta tabbata kuskure na low-light, sensor na RGB-IR, da HDR na ƙarfi a matsayin 120 dB. AI-ISP ta dace kwalitas na taswira da kuskure na kuskure. |
| ƙwaƙwalwar ajiya | LPDDR4/LPDDR4x/LPDDR5 (4GB/8GB/16GB da zahiri) |
| Kantin na a cikin | eMMC (16GB/32GB/64GB/128GB/256GB da aka sa kuma) |
| Fasahar Larabawa | Fasahar Larabawa: 8K@30fps/4K@120fps (H.265/HEVC, VP9, AVS2, AV1) 4K@60fps (H.264/AVC) Fasahar Larabawa: 4K@60fps (H.265/HEVC, H.264/AVC) Fasahar Larabawa na Tashin: 4K@60fps MJPG |
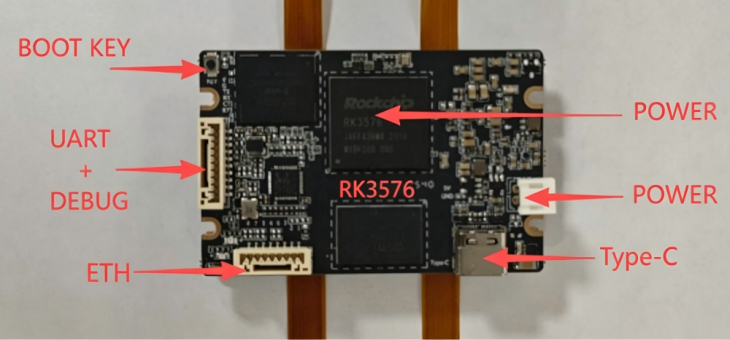
| ikon | DC 5V |
| OS | Yana taimaka RTLinux kernel wanda ke iya yin aiki na lokacin yanzu da kyau, wanda aka amfani da shi a matsayin al'adu na sannan. Yana taimaka Linux OS da Buildroot don baiwa muhimmin cikakken da dukkanin halin da kariya don samun halin da kariya da kariya don samun halin da kariya da kariya. Yana da abubuwan da suka zama muna da al'adu na sannan kamar fasahar lokacin yanzu na kofa, Flexbus, isolar da abubuwan da suka zama muna da al'adu na sannan, da DSMC, wanda ke taimaka a cikakken da kariya na sannan. |
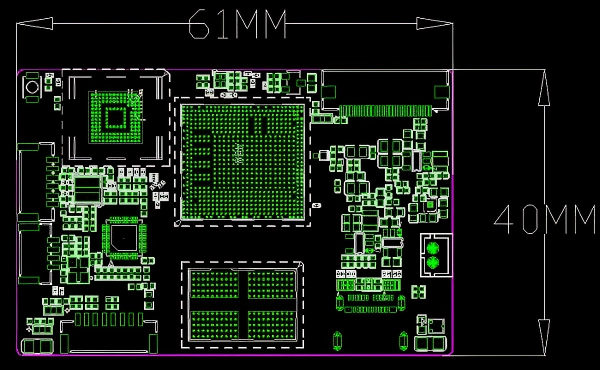
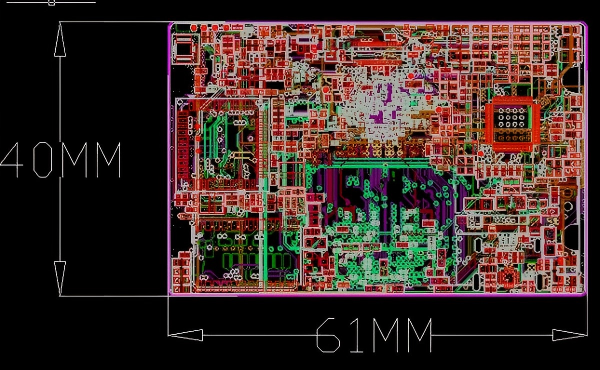
| girma | 61mm × 40mm × 9mm |
| Yana taimaka Camera | mipi interface na 4-channel, 2-lane: OV9281, IMX662, AR0234, IM464, da sauran, ta sanya iko ga kafa |
| IMU gyroscope | 4 gyroscope na ICM42670 na sarin TDK |
| Ethernet | 1 port na Gigabit Ethernet (yana wasuwa ta hanyar 8P-1.25 mm Wafer socket) |
| Wifi/ PDA | Yana da WiFi module na gaba daya wanda ya taimaka double-band WiFi 6 (802.11a/b/g/n/ac/ax) a 2.4 GHz kuma 5 GHz, kuma taimakawa na Bluetooth. |
| USB | 1 port na Type-C USB 3.0 na gaba daya (yana taimaka ADB) |
| ƙarƙashin ƙirar | Rutin 1 |
| push-button | Button 1 |
| Wani Kadan Na Fasahin | 1 kwaya na UART, 1 kwaya na Debug |
Tsawon motherboard
 |
 |
Bayani na kashe
 |
 |
KARFI
Tsayar Gida
Zazzabi
Aiki: 0℃ zuwa +40℃
Ajiye: -20℃ zuwa +70℃
Rashin ruwa ajiye
Aiki: 10% zuwa 90% (ba tare da kusursun ruwa ba)
Ajiye: 5% zuwa 95% (ba ta kawo wani abu)
Fadamar Altitute
Aiki: 10,000 ft. (maksimum)
Ajiye: 20,000 ft. (maksimum)
Yanayen gaba daya da ajiye
Tarihin amfani da shawara na yin amfani da GB2423.2 “Test Bd & Bb”
Yanayen gaba daya da ajiye
Tarihin amfani da shawara na yin amfani da GB2423.1 “Test Ad & Ab”
Yanayen gaba daya da tsinku da yanayen gaba daya
Tarihin amfani da shawara na yin amfani da GB2423.3 “Test Ca” da GB2423.22 “Test Nb”
Suna da sauyi da amfani
A cikin zamanin da aikin yin kuma amfani, da fatan ku biyo da ku duba waɗannan (kuma ba ta hanyar da aka fadi) bayanin masu daga gaba:



